
Contents
エンドエフェクタ
食器下洗い・食洗機への投入作業用エンドエフェクタシステム
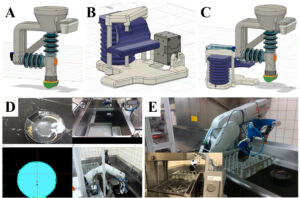
説明文(概略):下膳された食器をカメラで認識し、ロボットハンドを用いて、下洗い作業から食洗機への投入まで一連の動作を実現するロボットシステムである。
説明文(詳細):下膳された食器を高速で下洗い・食洗機へ投入するため開発したロボットシステムである。重なる食器から1枚ずつ引き出して把持するため、高分子材料で作ったベローズアクチュエータを用いて引き出し機構(A)と把持機構(B)を作製、二つの機構を組み合わせてロボットハンド(C)を構成される。3Dカメラで食器を認識し、ロボットハンドを用いて、下洗い作業を行い(D)、その後ラックに食器を投入し、ラックを食洗機に押し込むことによって、一連の動作を自動で実現する
食器取出し作業用エンドエフェクタシステム
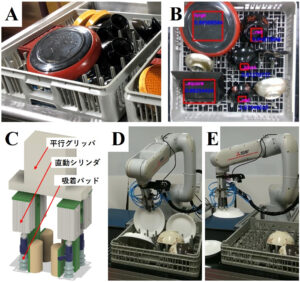
説明文(概略):機械学習を用いて洗浄された食器を認識し、掴みと吸着の両機能を持つロボットハンドにより食器をラックから取り出すロボットシステムである。
説明文(詳細):食器洗浄後、ランダムに置かれている食器(A)を縦置きと横置きを分類し、機械学習を用いて、食器種類と把持位置・姿勢を認識する(B)。縦置きと横置きの食器をハンドリングするため、掴みと吸着の両機能を持つロボットハンドを開発した(C)。平行グリッパでハンドの開閉動作を実現し、柔軟且つ高摩擦材を持つハンドで縦置きの食器を掴む(D)。一方、横置きの食器に対して、直動シリンダで吸着パッドを伸ばし、食器の底面に吸着してハンドリングする(E)。
天ぷら自動盛り付け用エンドエフェクタシステム
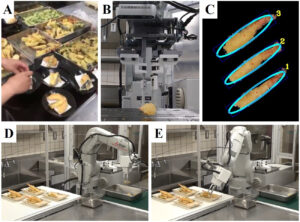
説明文(概略):5種類天ぷら(カボチャ・レンコン・サツマイモ・エビ・シシトウ)の認識を行い、弱い把持力(力制御)で天ぷらを崩せずに把持し、決められた位置と姿勢で天ぷらを自動盛り付けするロボットシステムである。
説明文(詳細):天ぷら盛り付け作業は図Aのようにレストランのバックヤードで行われている。この作業を自動化するため、力制御できる3本の棒を持つロボットハンドを開発した(B)。1つのモーターで開閉動作と力制御を行っている。3Dカメラを用いて、5種類天ぷら(カボチャ・レンコン・サツマイモ・エビ・シシトウ)の把持位置と姿勢を認識する(C)。図DとEは立命館大学生協食堂のバックヤードで実証実験を行った様子である。
細断食品把持用包みグリッパ
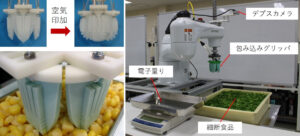
説明文(概略):柔軟素材で構成され、空気圧で包み込む動作をするグリッパである。3Dカメラでデプス情報を計測し、グリッパの挿し込み量を制御することによって、細断食品の把持重量を調整する。
説明文(詳細):細断食品(刻みネギやコーンなど)を定量的に弁当に自動でトッピングするため、柔軟素材(シリコンゴムなど)を用いて製作した空気圧駆動ロボットグリッパである。複数の柔軟チャンバーに空気圧を印加することで包み込むような動作をし、細断食品を把持できる。3Dカメラのデプス情報に基づいて、挿し込み量を制御することによって、細断食品の把持重量を調整できる。
農作物(キュウリ)自動箱詰め用平行シェルグリッパ

説明文(概略):キュウリなどの農作物を自動的に箱詰めするため、柔軟膜を有する空気圧駆動ロボットグリッパである。グリッパが薄い構造(厚みが3mm)を持つため、農作物のバラ積みピッキングにも活用できる。
説明文(詳細):キュウリなどの細長い農作物の複数を同時に箱詰めする際に、農作物を把持した後に、隙間をなくしてから箱に入れる必要がある。そのため、薄型の平行シェルグリッパを開発した(左上図)。硬いシェルの上に柔軟膜を設置し、空気圧を印加すると柔軟膜が膨らみ、農作物を優しく把持することができる。離型フリーの製作方法を提案し、厚み3mmまで製作可能となり、複数本キュウリを同時に把持できるロボットハンドを作製した(左下図)。スカラロボットを用いてキュウリの箱詰め実験を行った様子は右図に示す
水産物ハンドリング用掬い込みグリッパ
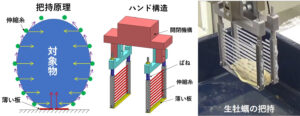
説明文(概略):水産物のような滑りやすい食品をハンドリングするため、対象物の下から薄い板を用いて重力を支え、側面から伸縮性がある柔軟糸で包み込むような掬い込みグリッパである。
説明文(詳細):コンベアから流れてくる食品や水産物、特に薄くて滑りやすい脆弱もの(例えば生ハンバーグ、魚、生牡蠣など)、をロボットでハンドリングする際、従来のグリッパ式ロボットハンドで対象物の側面だけを把持して持ち上げることは困難である。そのため、本開発では、薄い板を対象物の底面の下に挿し込み、対象物を掬い上げると同時に、高伸縮性がある糸や膜で側面と上面から包み込むように対象物を把持する。こうすることで、従来把持困難の食品や水産物を安定的にハンドリングすることができ、食品産業や研究機関での使用が見込まれる。
円形シェルグリッパ
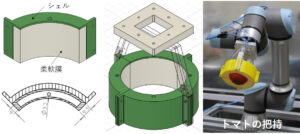
説明文(概略):硬いシェルと柔軟膜で構成された空気圧駆動グリッパである。柔軟膜の変形で様々な食品等の形状になじむことが可能となり、硬いシェルで柔軟膜の膨らみを拘束され、安定的に対象物を把持できる。
説明文(詳細):硬いシェルと柔らかい膜で構成され、空気圧の変化による、柔軟膜の伸び縮みを利用したソフトグリッパである。チャンバー内部の空気圧を加減圧させることにより、把持部である表面膜を伸び縮みさせ、その表面膜を複数の方向から把持対象物へ接触させることで把持を行う。物体の形状に応じて膜がなじむ特性や、グリッパの姿勢は把持行為に影響しないといった特性から、あらゆる位置、姿勢の対象物を把持することができる。硬いシェルがあるため、柔軟膜の膨らみで発生した把持力が逃げなくなり、対象物を安定的に把持でき、捩じり動作も実現できる。
ニードルグリッパ
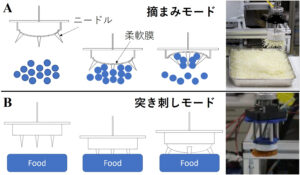
説明文(概略):硬いニードルと柔軟膜で構成され、摘まみと突き刺しの2種類の把持動作を実現可能となるグリッパである。細断食品(千切キャベツやひじきなど)を把持する際に摘まみ動作、箱詰め後の食材不良品を取り除く際に突き刺し動作を利用できる。
説明文(詳細):硬いニードルと柔軟膜で構成された空気圧駆動グリッパである。正圧と負圧を印加することによって、摘まみと突き刺しの2種類の把持動作を実現可能となる。摘まみ動作の場合、正圧でニードルを広げ、細断食品(千切キャベツやひじきなど)に差し込み、負圧でニードルを閉じると食品を摘まめる(図A)。突き刺し動作は主に食品生産ラインで不良品を取り除く際に利用することを想定する。ニードルを不良品食材に突き刺した後に、正圧や負圧を印加することで対象物を持つようにする(図B)。対象物の上面から把持できるため、箱詰め後の食品を取り除くことが可能となる。