R-CPS
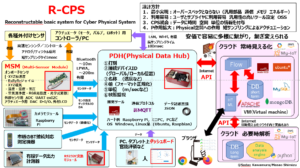
Reconstructable basic system for CPS(Cyber Physical System)
問い合わせ先
立命館大学 清水正男
mst21786@@fc.ritsumei.ac.jp
メールアドレスの@@は1つです。お気軽にご連絡ください。

R-CPS
Reconstructable basic system for CPS(Cyber Physical System)
立命館大学 清水正男
mst21786@@fc.ritsumei.ac.jp
メールアドレスの@@は1つです。お気軽にご連絡ください。