
Contents
- 電子回路
- 電源
- 1.アナログ信号変換(ADCに接続する前に考慮すべき内容)
- ①抵抗分圧回路
- ②信号増幅回路
- ③オフセット回路
- ④バッファ回路(緩衝増幅回路、ボルテージフォロア回路)
- ⑤I-V変換回路(4-20mA出力の対応)
- 2.アナログフィルター(LPF, HPF, Notch)
- ①LPF(Low-Pass Filter)
- ②HPF
- ③Notch Filter
- 3.アナログ回路シミュレータ(LTspice)
- 4.電源と接地(保安接地、信号接地、動力接地)
- 5.外部制御(power-MOS,フォトカプラ等)
- ①直接駆動
- ②間接駆動
- 6.DACとPWMとR-2Rラダー
- ① DAC
- ② PWM
- ③ R-2Rラダー回路
- 7.PLCとの接続
- 8.デジタル通信(有線通信)
- ① センサ-マイコン間の通信 SPI, I2C, 1-wire
- ⅰ) 1-Wire
- ⅱ) I2C
- ⅲ) SPI
- ②機器間のシリアル通信
- ⅰ) RS-232C
- ⅱ) RS422A
- ⅲ) RS485
- ⅳ) USB-シリアル変換
電子回路
電子機器の進歩に伴いデジタル化が進んでいますが、全ての部位をデジタルに置き換えることができるわけではなく、図1に示すように入力部(センサ部)、出力部(アクチュエータ部)、電源部はアナログ電子回路の理解が必須です。
本章では、MSMを応用し活用することを念頭に置き、そのために必要となる電子回路について解説します。
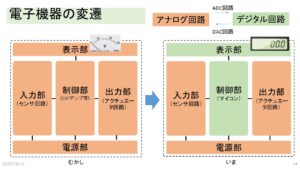
図0.1 電子機器の進化
電源
マイコン、センサ、直流モーターなどを動作させるためには、直流電源(DC電源)が必要です。一般家庭のコンセントは交流100V(AC100V)なので、ここから所望する直流電圧を供給する機器を電源器(パワーサプライ)と言い、以下のようなものが市販されています。写真は菊水電子の電源器。

電源には、定電圧電源と定電流電源の2種類があります。電源に繋いだ負荷が変化した場合、前者では、電源電圧を一定に保つために電流が変化します。後者では、電源電流を一定に保つために電圧が変化します。ほとんどの場合、使用する電源は定電圧電源と考えて問題ないです。本HPでも特に断らない限り、電源と言えば定電圧電源を指します。上記のような電源は、定電圧電源・定電流電源、どちらの用途にも使える電源です。
定電圧電源を使う際、所望する電圧、例えばマイコンを動かすためにDC5Vが欲しい場合、電源器の設定値を5Vに設定します。同時に流せる電流、例えば500mAを設定し、不測の事態に備え流せる電流を制限できるようにします。設定が終われば、outputボタンを押して、電気を供給します。
電源器には、シリーズ電源器とスイッチング電源器の2種類があります。スイッチング電源は、スイッチングノイズが出る場合がありますが、最近ではノイズが気になる電源はほとんどありません。ノイズが気になるような精密計測をする場合には、シリーズ電源器を使うことをお勧めします。
回路に修正を加える際には、電源を切った状態で行うことが原則です。最近では高電圧回路を扱うことは、稀なので感電の危険性は少ないですが、電源を入れたまま回路修正を行うと、電子機器の破損につながることがありますので要注意です。
モバイル運用などでは電池を使用します。電池も定電圧電源の一種です。必要に応じて使い分けてください。一般的な電池には電流を制限する機能はありませんので、短絡(ショート)させると、一気に大電流が流れ、発熱、最悪の場合には発火する恐れがあります。電池には電源器のようにON・OFF切り替えることは出来なく、常に端子から電気が流れる状態です。保管する際には、金属のケースは避け、保管中に短絡事故が無いように注意してください。
尚、電源の配線については、以下の「4.電源と接地(保安接地、信号接地、動力接地)」の項についてもご一読ください。
1.アナログ信号変換(ADCに接続する前に考慮すべき内容)
アナログ信号を大別すると、「電圧」の信号と「電流」の信号に大別できます。最初に、「電圧」の信号処理について解説します。アナログ出力のセンサの出力信号を扱う場合に必要な回路です。センサの出力信号をアナログ回路によって処理し、ADC(Analog to Digital Converter)を介して、デジタル信号にして、その後はデジタル信号として処理することが一般的です。
MSMにはADC(Analog to Digital Converter)専用のICを搭載しています。また、MSMをアナログモードで動作させた際には、マイコン(ESP32)のI/O(ADC)を使って信号を読み込むことができます。共に「電圧」の信号が対象です。
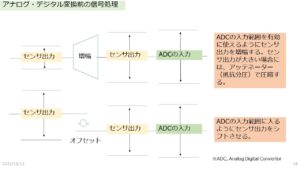
これらのADC回路にアナログ信号(センサ出力)を入力する際には、ADCの入力範囲とセンサの出力範囲の関係を考えます。①センサの出力範囲がADCの入力範囲よりも大きな場合は、電圧分圧回路を用いて、ADCの入力範囲内に収めることが必要です。②センサの出力範囲がADCの入力範囲に比べて小さすぎる場合、下図に示すように間に増幅回路を設けて、ADCの入力範囲を十分に使えるようにすることが必要です。小さすぎるままだと、ADC回路の分解能力を有効に使うことができなくなります。③センサ出力範囲とADCの入力範囲がずれる場合(図の下)は、間にオフセット回路を挿入して、ADC回路の入力範囲にセンサの出力範囲が収まるようにします。
アナログ信号の処理
①抵抗分圧回路
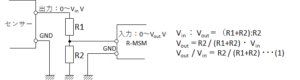
センサの出力電圧範囲がADCの入力範囲を超える場合、抵抗分圧回路を用いて、センサの出力電圧範囲がADCの入力範囲内に収まるようにします。回路は、下図のように抵抗を2本使用します。
![]()
抵抗分圧回路(2本の抵抗を使った回路)から考えると、センサの出力がVin、ADCへの入力がVoutに相当します。センサ出力、ADCの入力電圧を、それぞれ、Vin、 Voutとすると、以下の式が成り立ちます。
Vout=R2/(R1+R2)Vin
Vinが0~5V、Voutが0~3.3Vの場合、
Vin / Vout = 3.3 / 5 ≒2 / 3 = R2 / (R1+R2)
R2=2、R1+R2=3
∴ R1=1
となり、R2は、R1の約2倍の抵抗が、必要となります。
抵抗分圧回路における出力電圧は用いる抵抗の抵抗値の比だけで決まります。理論だけで言うと、1Ω:2Ω、1MΩ:2MΩ、等の組み合わせでも良いことになります。しかしながら、例えば、1Ω:2Ωとすると、抵抗分圧回路自体に流れる電流は、Voutが5Vの時、1.6Aとなり、センサ自体の出力能力を上回るほどの大きな電流が流れてしまい、センサ自体のドライブ能力を超え(センサから必要な電流を流せない)、センサの出力素子を破壊してしまう可能性が大きくなります。また、逆に1MΩ:2MΩなど、非常に大きな抵抗値とすると、ADCを十分にドライブすることができなくなります(ADCが必要とする電荷[電流]を短時間で流せない)。
以上のことから、センサのドライブ能力の範囲内で、かつ、ADCを十分ドライブできるように、実回路では、R1, R2ともに数10kΩ程度の抵抗器を用います。具体的には、この事例では、R1 = 5 kΩ、R2 = 10 kΩを使用すれば良いでしょう。
アナログ機器の0~10V出力を、0~3.3VのマイコンADCに接続する際のR1,R2は、以下のようになります。
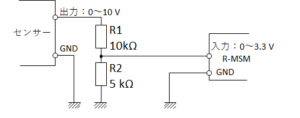
図2.0~10Vを0~3.3Vに変換する場合の抵抗分圧回路
Vinが10V、Voutが3.3Vの場合、上記(1)式に当てはめると
Vout / Vin = 3.3 / 10 ≒1 / 3 = R2 / (R1+R2)
R2=1、R1+R2=3
∴ R1=2
R1=10 kΩとすると、R2=5 kΩとなります。
②信号増幅回路
信号増幅回路・オフセット回路・バッファ回路(後述)にはOPアンプ(オペアンプ)を用います。OPアンプには、2つの入力端子があり、その回路構成によって、反転増幅回路・非反転増幅回路になります。下図の左上が一般的な反転増幅回路です。増幅率は、R1とR2との比率で決まります。 オフセット回路は、下図の右上のようにOPアンプの+入力端子に対して、オフセット電圧(Vref)を入力します。下図のシーソーの支点がオフセット電圧、支点からのそれぞれの斜辺長さ(シーソーの板の長さ)の比が増幅率に相当します。
反転増幅回路の増幅率とオフセット電圧との関係は、下図の右下のようなシーソーのような関係になります。オフセット電圧で、無入力時の出力電圧が決まり、入力信号が増えると出力信号が減るという反転した関係になりますので、ADCでデジタル信号(数値)として取り込んだ後、マイコン内で演算した後、後段へ出力すると良いでしょう。
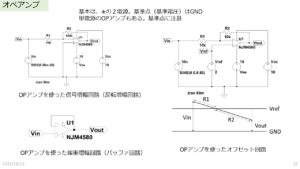
図3. OPアンプ
OPアンプは、入力インピーダンスが非常に高く、また増幅利得も大きいため、センサ回路には適したICです。下記の回路は、OPアンプの代表的な回路で、非反転増幅回路と呼ばれます。この回路の増幅度は、抵抗R1とR2の値で決定されこの抵抗を適切に決めることにより、信号増幅回路や、バッファ回路(利得0 dB)となります。
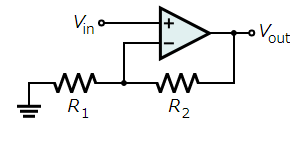
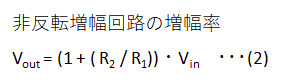
図4.非反転増幅回路(出典:フリー百科事典「ウィキペディア(Wikipedia)」
③オフセット回路
出力電圧をオフセット(レベルシフト)する場合は、差動増幅回路で構成します。
オフセット回路は、センサーの出力が、±1.0 Vなどのように、R-MSMの読み込めない範囲に出力が存在する場合、R-MSMが読み取り可能な電圧範囲に変換する場合に使用します。
下図は、OPアンプの差動増幅回路を用いたオフセット回路です。赤破線の右側が差動増幅回路です。左半分の回路はレベルシフトする電圧を安定化させるために、次項で説明するボルテージフォロワ回路を用いています。下記回路で、
R1=R3=10kΩ : R2=R4=50kΩ
で増幅度は、
R2/R1=R4/R3=5.0(倍)
となります。差動増幅回路では、OPアンプの反転入力と非反転入力の電圧差を入力となるので、反転入力側の電圧を調節することで電圧差を広げるのに必要な電圧(=レベルシフト電圧/増幅度)を入力します。
下図の例では、レベルシフトを1.5Vとしているので、負側電源電圧(VCC-)を分圧し、-0.3Vを反転入力側に引加しています。これにより出力側では、1.5Vレベルシフトすることになります。
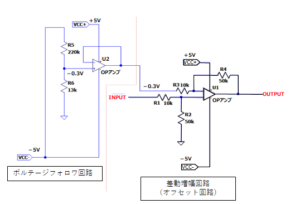
図5.オフセット(レベルシフト)回路
④バッファ回路(緩衝増幅回路、ボルテージフォロア回路)
センサとバッファ回路との関係を下図に示します。例えば、抵抗値変化型のセンサを使う場合、下図の左上や左下のように基準になる抵抗と直列にして使います。外界からの影響により抵抗値が変化することで、出力(抵抗との接点)が変化します。これを、次段の回路(増幅回路など)に接続するのですが、次段の回路特性が前段のセンサ回路側へ影響を及ぼし、センサ出力が変化する場合があります。このような、次段の状態を前段の回路(センサ)に及ぼさないようにするために用いるのがバッファ回路です。
上述したADC専用ICでは、前段に影響を及ぼさないように設計されているので、バッファ回路を設ける必要はまずありません。
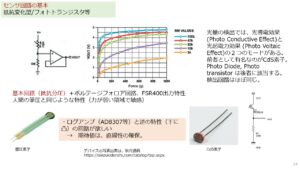
図6. センサとバッファ回路との関係
以上が「電圧」の信号に対する回路です。次は「電流」の信号について説明します。
電流信号の取り扱いは、以下にのべるように、I-V変換回路(電流電圧変換回路)を用いて、電圧信号にして、それ以降は電圧信号として処理します。
⑤I-V変換回路(4-20mA出力の対応)
センサーや制御機器の中には、電流の大きさで出力するものがあります。一般的に4-20mAの範囲で出力される機器が多いです。電流出力はノイズ耐性が良いので、配線が長くなる場合には有効な方法です。また、断線した場合、電流が流れなくなるので、出力側の機器の故障(断線)の発見が容易です。
R-MSMに入力する場合、センサや機器の出力電流を電圧に変換する必要があります。つまり、I/Oとして電流電圧変換回路(I-V変換回路)を追加します。具体的には、R-MSMの入力端子とGND端子の間に、抵抗を接続し、基本的には最大出力電流の20 mA 時に抵抗の両端に3.3 V の電圧が発生するような抵抗値をえらび、接続します。このような用途の抵抗をシャント抵抗と呼びます。応用として、センサ側の出力が、10mAまで出力されないならば、MSMのADCの入力幅を最大限使えるように抵抗値を設定します。その後、具体的な計測値への変換は、PDHのNode-REDのフローで行います。
例えば、オームの法則より、接続する抵抗は下記の様になります。
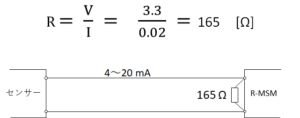 図7.I-V変換回路(4-20mA出力の対応)
図7.I-V変換回路(4-20mA出力の対応)
I-V変換用の抵抗(シャント抵抗)は、温度特性の良い(温度依存が少ない)金属皮膜抵抗をつかい、必ずR-MSMのコネクタ側近傍に接続してください。
2.アナログフィルター(LPF, HPF, Notch)
信号に、外来ノイズや特定の周波数のノイズが、乗ってしまうことがあります。また、例えば空気の温度を測る場合、測定位置の空気の流れが一様でないため、細かく変動し大きな変化が見えにくくなる場合があります。
このような場合、アナログフィルターを測定回路に挿入し、余分な周波数域の変動を減衰させてしまう方法があります。ADCで読み込み後ソフトウェアでフィルター処理を行うデジタルフィルターもありますが、アナログフィルターは、デジタルフィルターに対して、
- 入出力はリアルタイム処理 (デジタルフィルターは、処理時間の遅れが発生)
- 高周波帯域の信号に対応 (デジタルフィルターでは、高速処理が可能なプロセッサが必要)
等のメリットがあります。
アナログフィルターの種類としては一般的に、
・ローパスフィルター(LPF : Low Pass Filter)・・・ 遮断周波数より高い周波数成分の信号を遮断
・ハイパスフィルター(HPF : High Pass Filter) ・・・ 遮断周波数より低い周波数成分の信号を遮断
・ノッチフィルター (Notch Filter)・・・ 特定の周波数成分の信号を遮断
・バンドパスフィルター(BPF : Band Pass Filter) ・・・ 特定の周波数帯域成分の信号のみ通過
があります。
バンドパスフィルターは、ローパスフィルター(以降LPF)とハイパスフィルター(以降HPF)を組み合わせることで実現可能で、ここでは、LPF, HPF、Notch Filterについて説明します。
①LPF(Low-Pass Filter)
LPFは、高い周波数域、例えば 1kHz 以上に発生する不要雑音(ノイズ)を抑制するために使用します。
遮断周波数flp は、以下の図に示す式で計算可能です。実際には、遮断周波数flpと抵抗値Rまたはコンデンサ容量Cを決め、それぞれの値を決定します。
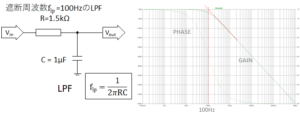
図8.LPF回路とゲイン曲線
②HPF
HPFは、低い周波数域、例えば 20Hz 以下に発生する不要雑音(ノイズ)を抑制するために使用します。
遮断周波数fhp は、以下の図に示す式で計算可能です。実際には、遮断周波数flpと抵抗値Rまたはコンデンサ容量Cを決め、それぞれの値を決定します。
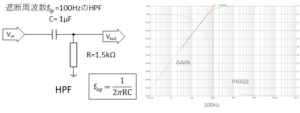
図9.HPF回路とゲイン曲線
③Notch Filter
Notch Filterは、特定の周波数、例えば 50 Hzや60Hzなど電源周波数などが信号に混ざってしまった場合に発生する不要雑音(ノイズ)を抑制するために使用します。
遮断周波数fn は、以下の図に示す式で計算可能です。実際には、遮断周波数flpと抵抗値Rまたはコンデンサ容量Cを決め、それぞれの値を決定します。
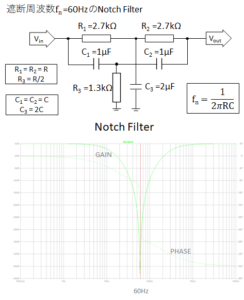
図10.Notch Filter 回路とゲイン曲線
3.アナログ回路シミュレータ(LTspice)
上記のようなアナログ回路を設計するためには回路シミュレータを利用すると便利です。その一つに、LTSipceがあります。以下のURLからダウンロードできます。
https://www.analog.com/jp/design-center/design-tools-and-calculators/ltspice-simulator.html

図11.LTspiceのダウンロードページ
入門として、前章のフィルターの設計等に活用してみてください。
4.電源と接地(保安接地、信号接地、動力接地)
接地(グランド)は3種類に大別することができます。保安接地は、感電防止のために機器の筐体などを接地(アース)するために用います。信号接地は、センサなどの基準電位(グランドレベル)です。動力接地は、モーター、ヒーター等の比較的大きな電力を使う機器のための接地線(グランド線)です。
一般的には、これら3種類は電気的には同じなのですが、実務上は、別々に扱う方事が望ましいです。特に信号接地線は他者からの影響を受けやすく、センサの検出に影響を与えることもあり得ます。1つのシステム(機器)内では、これらが共存することが多いのですが、1点だけでそれぞれを接続するようにします。
例えば、圧電材料を使たセンサの場合、出力信号が正負に出力されますので、基準電位をグランドレベルとして、±2電源のOPアンプを使って信号処理する場合、センサの基準電位(センサのグランド電位)をプラス側にシフトさせ、全体をプラス側だけで処理する場合、どちらも使われるので、センサの基準電位には注意してください。
また、信号用の接地線どうしが複数点で接続され、ループを形成することが無いようにします。信号用の接地線どうしも1点だけで接続されるようにします。複数の同軸ケーブルを使った場合、同軸ケーブルのグランド側どうしが、その両端で接続されループを形成することがあります。要注意です。

図12.1点アース
5.外部制御(power-MOS,フォトカプラ等)
①直接駆動
MSM(マイコンと同じ)のデジタル出力(ON/OFFの信号)を使って、LED等の小電力の部品をそのまま駆動させる場合は、以下の回路のように電流制限用の抵抗を接続します。マイコンのI/O端子のドライブ能力(流せる最大電流)を超えないようにします。
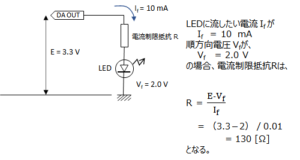
図13.LED点灯回路
デジタルI/Oの出力電圧をVout、 流れる電流をI、電流制限用の抵抗をR、 LED点灯時にLED両端に生じる電位差をVfとすると下記の式が成り立ちます
Vout = IR + Vf
次に、接続するLEDについて考えます。Vf=2.0V, If=10mAとします。VfはLED点灯時にLED両端に生じる電位差、If(=I)は点灯させる際に流す電流です。一般的な小型LEDでは数10mAです。上記の式から、R=130Ωとなります。実回路では100Ω程度の抵抗を取り付けます。この時、電流値がデジタルI/Oの最大出力電流値を超えないことが必須です。
②間接駆動
高電圧の回路や大きな電力を使う回路を駆動させる場合には、1次側(マイコン側)と2次側(駆動される側、高電圧・大電力側)との間に、中継用の回路を設けることが必要です。LEDのようにマイコンの出力を使ってそのまま駆動することはできません。
Nch Power MOS-FETを用いた事例を紹介します。電源から、駆動される機器(下記の図では抵抗)とFETを直列接続し、グランドへ接続します。Vin(FETのゲート)にプラスを印加するとチャンネルがONし電流が流れ、機器が動きます。実際の回路では、ゲート(Vin)は、抵抗を使って必ずプルダウン(GNDの接続)してておきます。実務上、機器の取り扱いを考えて、Vinの所でコネクターを取り付けて、制御側が取りはずせるようにする場合が多く、取りはずした際にMOS-FETのゲートがハイインピーダンスになり誤動作することを防ぐためです。
実務的には、型番2SK2232や2N7000(小電力)がお勧めです。
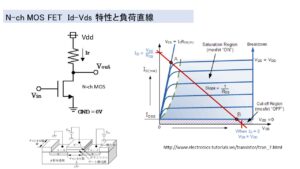
図14. Power MOS-FETを使った回路(最適図に差し替必要)
下記に機械式の継電器(リレー)とフォトカプラについて説明します。前者では一次側に電磁コイル2次側に機械式接点を用います。後者は光を用いて信号を伝達します。上記のPower MOS-FETを用いた回路では、GNDが一次側と二次側が共通になっていましたが、これらでは、共に1次側と2次側を分離することができ、絶縁性に優れています。
1次側のグランドと2次側のグランドは、”接続せず”切り離して使用してください。
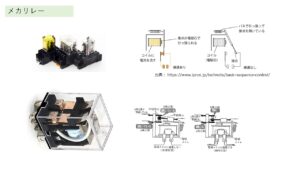
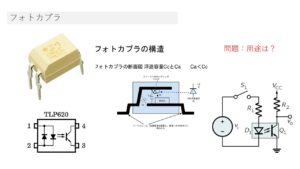
図15. (上)リレー(機械式継電器)、(下)フォトカプラ
メカリレーを使う際、リレーのコイル(巻線)の電流を切った瞬間、コイルの自己インダクタンスにより逆起電力が発生します。この逆起電力によるマイコン側の損傷を防止するためにためにコイルの端子に、電流方向と逆方向を順方向となるようにダイオードを接続します(下16図参照)。実務的には、整流用ショットキーダイオード(1S4等)がお勧めです。
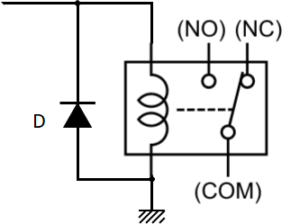
図16.メカニカルリレー逆起電力保護ダイオード
6.DACとPWMとR-2Rラダー
① DAC
デジタル処理をしているマイコンからアナログ信号を出力したい場合は、DAC(Digital Analog Converter)に対して命令(値)を送ります。DAC出力端子からは送られてきた命令(値)に応じた信号を出力します。
MSMにもDAC専用チップを搭載していますが、MSMでは電空レギュレーターなどの設定電圧を出力する用途を想定しています。
MSMの内部のDAC(Digital Analog Converter)に対してコマンドで設定値を送ると、送られてきた値に応じた電圧(例えば、1.6Vや2.5V)を出力します。MSMでは、この設定値をEEPROMに保存しますので、電源を切ったりリセットがかかっても動作が復帰すれば以前に設定された電圧を出力します。異なった値が設定されるたびにEEPROMに書き込みを行いますが、EEPROMには書き込み回数に制限がありますので処理ループの中で頻繁に書き換えを行う用途には向いていません。信号波形を再現するような用途には使用しないようにしてください。
DACの出力アンプの定格値を超える事が想定されるような場合は、外付けでの電圧変換や後段に出力アンプを設置するなどして定格を超えないように使用してください。
② PWM
PWM(Pulse Width Modulation)とは、一定の出力電圧で、その出力時間比を制御することで、平均的な出力電力を制御する方法です。例えば、10Ωの抵抗に対して、10Vの電源電圧で、出力時間比(デューティー比)を25%で駆動すると、消費電力は2.5Wです。これは、2.5V常時通電の時と同じ電力になります。PWMでの電力制御と抵抗器を使った電力制御の比較を下図に示します。
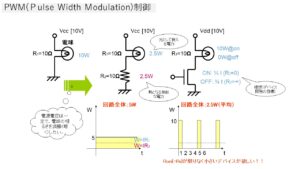
図17. PWM原理図
DACが無い場合、上記の原理を利用し、PWM出力に平滑回路を加えることで、アナログ電圧を得ることが可能です。以下に平滑回路の例を示します。平滑回路(LPF)の後には、ボルテージフォロア回路(緩衝増幅回路)を入れます。正確な電圧を出力したい場合にはDAC専用ICを使うことをお勧めします。
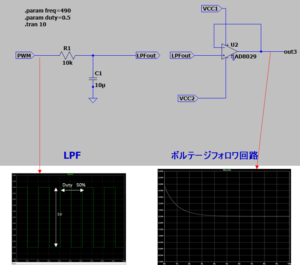
図18.LPF+ボルテージフォロワ回路によるPWMの平滑化
(LTspiceによるシミュレーション結果:LPF 遮断周波数 fLPF = 1.6 Hz)
③ R-2Rラダー回路
デジタル出力I/Oポートを複数個同時に使って、その使ったビット数に応じた解像度を持つステップ状(疑似的アナログ)の電圧を出力する回路を構成する事ができます。
ArduinoのようなマイコンのI/Oポートを使う場合、使用するI/Oポートを”同時”に切り替えるコマンド(PORTD)を使うことが必要です。
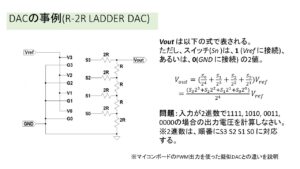
図19. R-2R Ladder DAC 図は更新差し替え
7.PLCとの接続
マイコンのデジタル出力は、High/Lowの2値、例えば、5V:0V、VDD(電源電圧):GND(グランド電圧)の2値です。対してPLCでは、抵抗値がゼロと無限大の2値と考えます。また、抵抗値がゼロの場合には2種類あり、GNDレベルに接続されて抵抗値がゼロの場合(これをNPN接続と言います)と電源電圧に接続されて抵抗値がゼロの場合(これをPNP接続と言います)の2種類です。
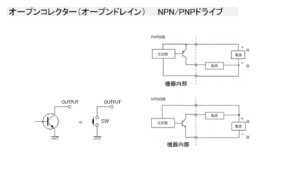
図20. PLCの出力取り扱い
8.デジタル通信(有線通信)
① センサ-マイコン間の通信 SPI, I2C, 1-wire
表1.は、センサ-マイコン間の通信で使用される 「1-wire」「I2C」「SPI」の概要を示したものです。
表1.通信方式概要
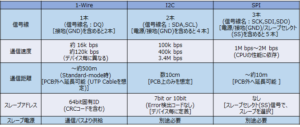
それぞれの通信方式には特徴があり、用途に応じて使い分けます。
ⅰ) 1-Wire
1ーWireは、その名前の通り、信号線と電源線が1本の信号線(DQ)で接続され、接地線と合わせて2本の線で、接続することが可能です。このため、マイコンから遠く離れたセンサ/デバイス(約500m迄)と2本の線で接続することが出来ます。また複数のセンサ/デバイスが1-Wireバスに接続されている場合は、1-Wireマスタは64bitIDを指定して、通信を行う1-Wireセンサ/デバイスを指定する必要があります。また、同期のためのクロック信号は、信号線に含まれているため、必要ありません。
1-Wireの通信速度は2種類あります。
- Standard-mode(約16kbps)
- Overdrive-mode(約120kbps)
両モードに対応しているデバイス、片方のモードのみサポートのデバイスが存在します。
もっと知りたい方は、ネット検索で「1-wireとは」で検索すると、参考になる情報が入手可能です。
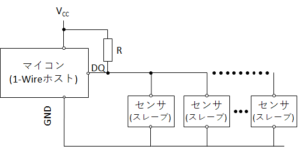
図21.1-Wire通信
ⅱ) I2C
I2Cは、2本の信号線(データ:SDA,クロック:SCL)と電源線/接地線の合計4本で接続します。I2Cは、基板内での通信を想定しているため、信号線の長さは、数十cm程度までが可能です。
もっと知りたい方は、ネット検索で「I2Cとは」で検索すると、参考になる情報が入手可能です。
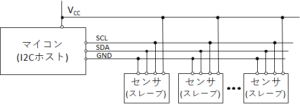
図22.I2C通信
ⅲ) SPI
SPIは、3本の信号線(クロック:SCK、単方向のデータ:SCO/SCI)および電源線/接地線、スレーブを指定するスレーブセレクト(SS)の合計6本で、接続します。SPIは、センサ/デバイス(スレーブ)にアドレス指定は不要で、複数のセンサ/デバイスを接続可能です。ただし、データの送受信をする前にスレーブセレクト信号で、対象のセンサ/デバイスを指定することが必要になります。配線長は、約10m程度までとなり、外部のセンサ/デバイスと通信可能です。
もっと知りたい方は、ネット検索で「SPI通信とは」で検索すると、参考になる情報が入手可能です。
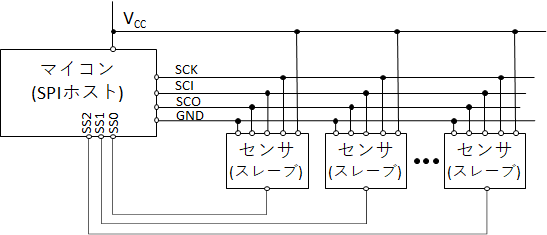
図23.SPI通信
(参考:1-wire, 外付けI2Cセンサの実例)
1) 1Wire インターフェースを使ったセンサ(DS18B20)
2) 外付けI2Cセンサー例
②機器間のシリアル通信
シリアル通信とは、データを送受信するための伝送路を1本、または2本使用して、データを1ビットずつ連続的に送受信する通信方式です。少ない信号線での接続が可能であるため、線材や中継装置のコストが抑えられるなどのメリットがあります。古くから、コンピュータと周辺機器であるモデムとの通信に使用されているのが始まりで、その規格がRS-232Cです。
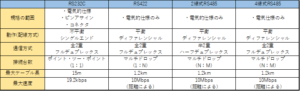
この通信のために、パラレル信号をシリアル信号に、またその逆に変換するIC集積回路がUART(Universal Asynchronous Reciever Transmitter)です。UARTは、非同期通信(調歩同期通信)にのみ対応しており、同期通信には対応していません。
表2.通信方式の比較
ⅰ) RS-232C
最も最初に使用されたシリアル通信です。元々は、コンピュータとモデムの間の通信を行うための通信規格で、通信速度も当初は遅いものでした(50bps~300bps程度)。つい最近までパソコンのインターフェースとして、標準的に装備されていました。その後高速化が図られ、現在のRS-232-C規格では、
- 50,75,100,150,300,600,1200,2400,4800,9600,19200(baud/sec)
です。RS232Cの特徴(欠点)は、
- ノイズに弱い ・・・ 信号電圧の高低で、信号のH/Lを区別
- 速度が遅い
- 伝送距離が短い(約15m以下)・・・ 距離が長いと電圧降下が発生し、信号の区別が出来ない
があります。
 図24.RS232Cの結線とデータラインの信号レベル
図24.RS232Cの結線とデータラインの信号レベル
ⅱ) RS422A
RS422はツイストペアの信号線2本で構成される平衡伝送が特徴です。必ず2本1組で動作しており、TTLからの”Hi”のデータは一方の信号線(TxD+)が+2~+6V、もう一方の信号線(TxD-)が0Vとなってドライバから送信され、”Lo”のデータは(TxD+)の信号線が0V、(TxD-)の信号線が+2~+6Vになって送信されます。
それを受けてレシーバは(RxD+)が(RxD-)の信号に対して相対電位差が高い場合に論理”1″、逆に低い場合に論理”0″となります。また回路端末は終端され、信号の反射を防ぎます。通常はレシーバ側のみ終端します。
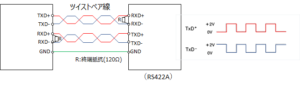
図25.RS422Aの結線とデータラインの信号レベル
ⅲ) RS485
RS485は、RS422をバス用にレベルアップさせた規格です。電気的にはRS422とほとんど同じ平衡伝送です。ただ決定的に異なるのが、RS232C/RS422はポイント・ツゥ・ポイント(1:1)の伝送に適用されるのに対して、RS485はバス方式のマルチドロップ(1:32)に適用されるという点です。
通信方式としては、半二重(2線式)と、全二重(4線式)の二つの方式があります。
一般的にRS485とは2線式RS485を指すことが多いです。2線式RS485は送受信2本の通信線と、GNDの計3本で通信します。送受信線が1つなので送信か受信かどちらかしかできません。データを送っている時だけ信号ラインを占有するので複数台接続が可能になりました。
4線式RS485は送信2本と受信2本の合計4本の通信線と、GNDの計5本で通信します。送受信線は別になっているので、送信・受信は同時に行うことができます。データを送っている時だけ信号ラインを占有するので複数台接続が可能です。
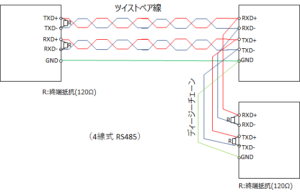
図26.4線式RS485の結線
ⅳ) USB-シリアル変換
すでに述べた、シリアル通信の他に現在主流となっているUSB(Universal Serial Bus)もシリアル通信です。PCでは、外部インターフェースにUSBのみが搭載されているものも多く、従来主力であったRS232Cが搭載されていないものが大半です。また、Raspberry PiやArduinoもUSBがシリアル通信の主力です。
しかし、接続する端末には、まだまだ従来のシリアル通信が搭載されいているものが多くあります。
このような場合、USBーシリアル変換器や変換ケーブルが、多数市場では、販売されています。
電子回路