駆動部品
センサデータなどを使ったデジタル処理や電子回路による信号処理を基に制御信号を作った後は、実際に機械的な動きに繋げることで「物をつかむ」「移動する」といった作業を実現することができるようになります。この章ではそういった機械的な動きをするための駆動部品(アクチュエータ)について解説します。
DCモーター
小型のものは昔からプラモデルやミニ4駆などに使われてきた、ごく一般的にみられる直流電源で駆動するモーターです。
このタイプのモーターは内部に固定の磁石が設置してあり、回転軸に取り付けられたコイルに電流を流すと発生する磁界によって、固定された磁石との間で引き合う力や反発する力が発生して回転軸を回す動きになります。
ただし、回転軸のコイルに同じ電流を流し続けていると、その時に発生したコイルの磁界と固定の磁石の引き合うところまで回転するとそれから先は回転することができません。実はDCモーターでは回転軸に「ブラシ」と呼ばれる接触端子が付いており、コイルによって回転軸が回る事によってコイルに流れる電流の方向を切り替える仕組みになっています。(下図を参照) この仕組みによって、電流を流す→引き合う力で回転→電流が切り替わる→次の引き合う力で回転→… という事を繰り返して回転を続けます。
この、固定した磁石(固定子)と回転軸のコイル(回転子)の位置関係によって、電気的に接触する「ブラシ」で電流を切り替えて(整流子)回転を続けるタイプのモーターである、と理解してください。
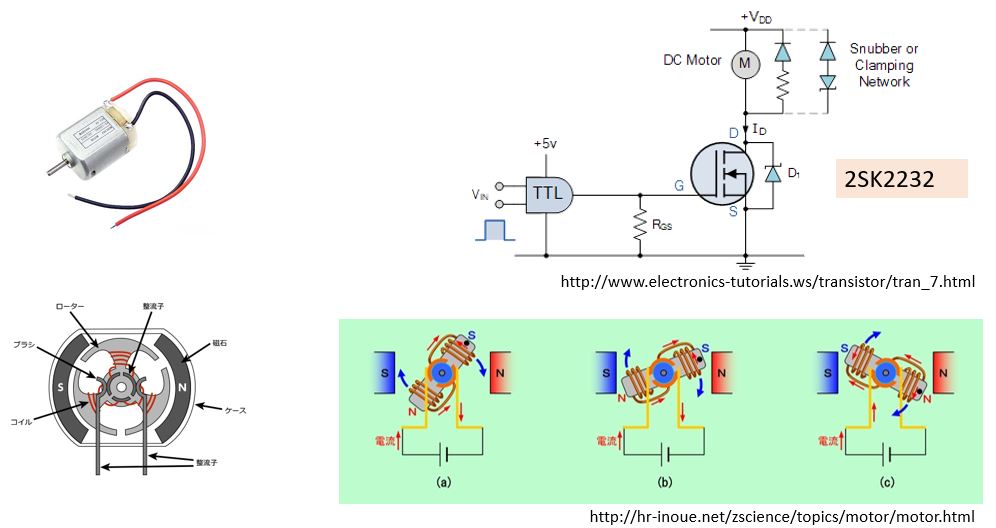
モーターの端子は、例えば上図の赤色リードと黒色リードの接続された2つの端子がありますが、この端子をどのように扱うかで4つの状態が考えられます。
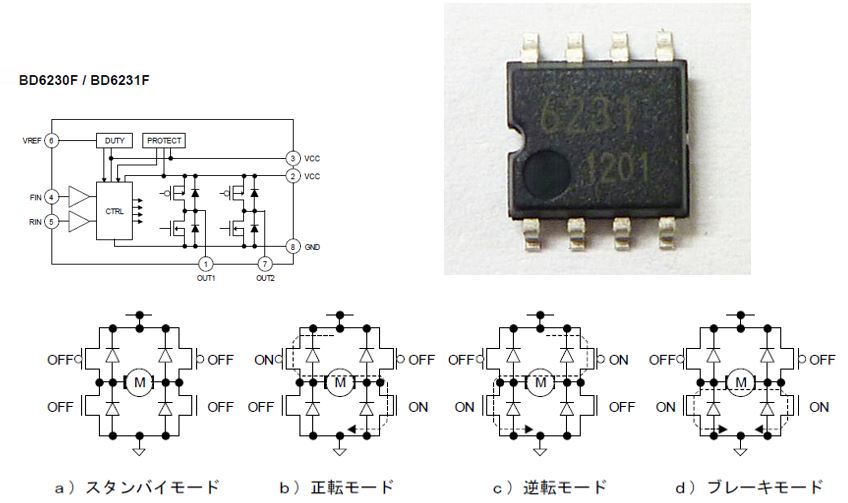
1.赤:解放 黒:解放 → スタンバイモード、何も接続されていない状態で回転軸はフリー。
2.赤:プラス 黒:マイナス → 正転モード、モーターは順方向に回転します。
3.赤:マイナス 黒:プラス → 逆転モード、モーターは逆方向に回転します。
4.赤:黒と接続 黒:赤と接続 → ブレーキモード、モーターの回転軸が外の力で回転した場合それにつれて電流が発生しますが、その電流を消費して回転軸の回転を抑える方向に力が働きます。機械的なブレーキのように完全に止められるわけではありませんので注意してください。
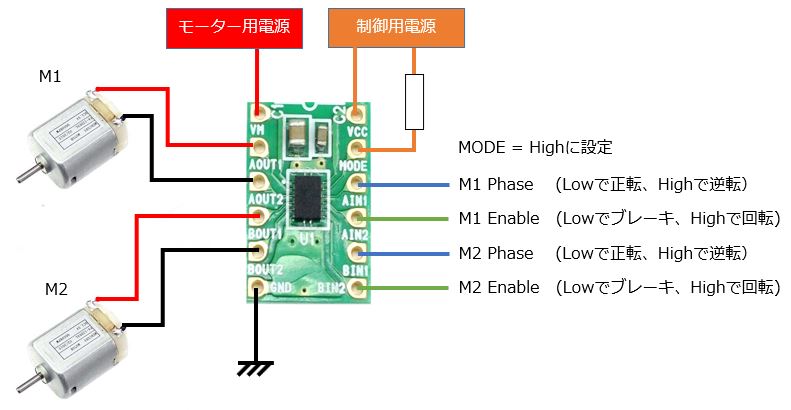
このタイプのモーターを駆動するのに使用するドライバICには下記のようなものがあります。
このドライバICでは、上記の4つの状態をFETのブリッジで実現しています。
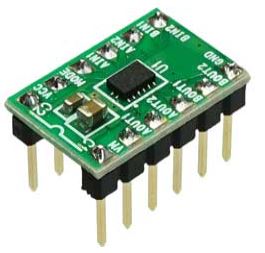
また、こういったドライバICを組み込んだ小型で使いやすいドライバモジュールも市販されており、ESP32やArduinoといったマイコンボードを使用してDCモーター を動かす事が簡単にできるようになっています。
下記のモジュールではモーター用電源と制御用の電源を分離することができるようになっており、制御用電源と異なる電圧でモーターを動かして回転数を変化させたり、モーターのノイズが制御側に影響するのを防ぐことができるような構造になっています。
・モータードライバIC DRV8835 でのDCモータの駆動 (https://akizukidenshi.com/catalog/g/gK-09848/)
ブラシレスDCモーター
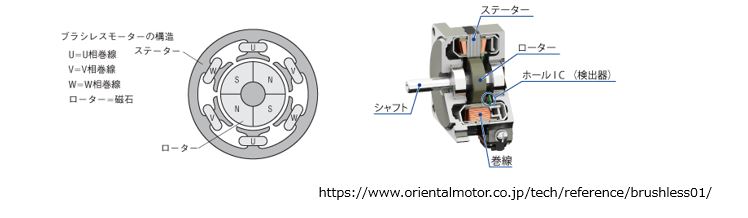
このタイプのモーターは、先に説明したDCモーターと同じように直流の電流を流すことで回転軸を回しますが、今度は回転子に磁石が配置され、固定子にコイルが配置される、といった具合に磁石とコイルの配置が逆になっています。この場合は回転子にコイルがないため機械的に摺動して電流を流すためのブラシを使う必要がありませんので信頼性も向上します。でも、磁石とコイルに発生する磁界によって回転する原理は同じなので、コイルに同じ電流を流しているだけでは回転することができません。では、どうやってコイルに流れる電流を切り替えているかというと、モーター内部にホールICという磁力を検知するセンサを配置してあり、回転子の磁石の極の位置がどこにあるかを検出して、それに応じて固定子のコイルの電流を切り替えていく事で回転を続けています。
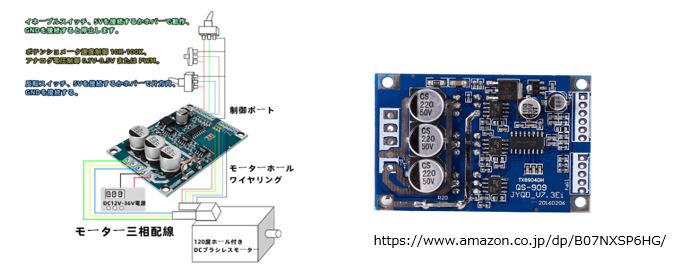
 ブラシレスDCモーターでもドライバモジュールが販売されています。
ブラシレスDCモーターでもドライバモジュールが販売されています。
下記の例に挙げたドライバモジュールは、120°で配置された三相のコイルを持つブラシレスDCモーターを駆動することができます。モーターの各相のコイルの配線と、回転子の磁石の極の位置を知るためのホールICの接続端子が設けられています。
ステッピングモーター
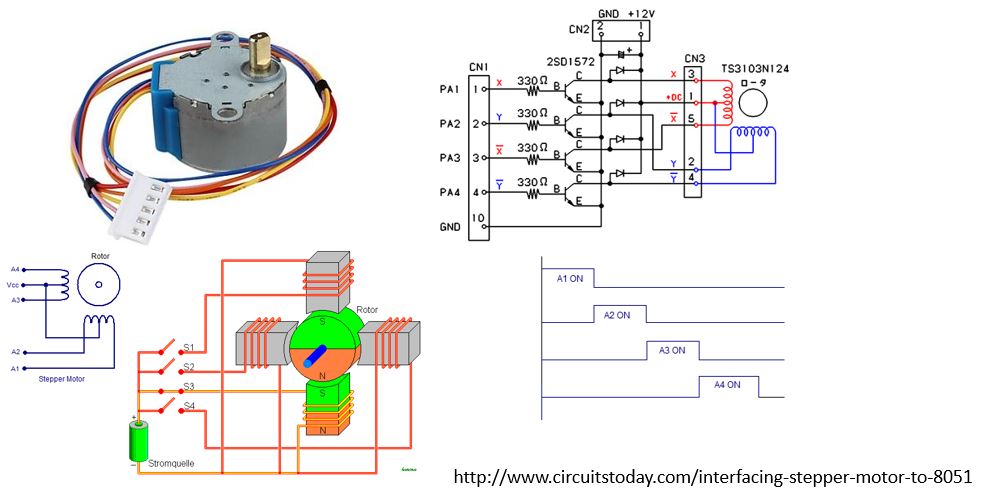
これまで解説してきたDCモーターやブラシレスDCモーターは、コイルに電流を流して発生した磁界と磁石の引き合う力と反発する力が常に回転する方向に働くよう、コイルに流す電流を切り替えるために様々な工夫をしていましたが、「コイルに流す電流が変化しなければ回転軸は停止する」という挙動を積極的に活用しているのがステッピングモータです。構造はブラシレスDCモーターと同様に磁石が回転子(ローター)になっており、固定子にコイルが設置されています。ただ、回転を続けるために回転子の磁極を検出するホールICは設置されていません。
このステッピングモーターでは、コイルに流す電流の流し方の組み合わせによって発生する回転子の停止位置を「ステップ」として、ある停止位置から次の停止位置に回転子を移動するためにコントローラー側から各相のコイルに流す電流を切り替えて1ステップずつポジションを進めて行きます。進めるステップの数を管理する事によってモーターの回転軸がどれだけ回転したかをコントローラー側で把握できることを特徴としています。
また、あるステップで停止している時はコイルに流れる電流と磁石の間に働く力で外力がかかってもその位置を保持しようとする力が働いています。(電流を切ると外力によって回転軸は簡単に回ってしまいます。)このように正確なポジションの管理ができる事と位置を保持する事ができる特徴を生かして、木材や金属を所望の形状に切削するCNCフライスといった工作機械や、ロボットアームの駆動にも利用されています。
ステッピングモーターの駆動方式には、固定子のコイルの結線の違いによるユニポーラ型とバイポーラ型があります。
また、駆動回路のタイプにより定電圧駆動と定電流駆動の違いがあります。コイルの結線と駆動回路の組み合わせで4つの方式が考えられます。定電流駆動はコイルに流れる電流を目標の値にコントロールできるのでモーターの能力をうまく引き出すことができます。回路が複雑になる事が難点ですが、定電流ドライバICを使用する事で使いやすい物になっています。
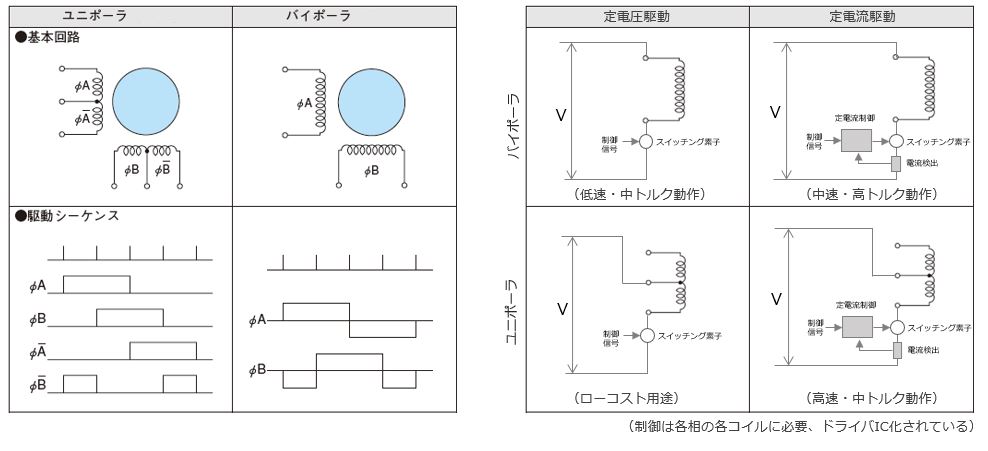
ステッピングモーターのステップを進めて回転させるには、ドライバから各相に対して駆動パルスを与えます。
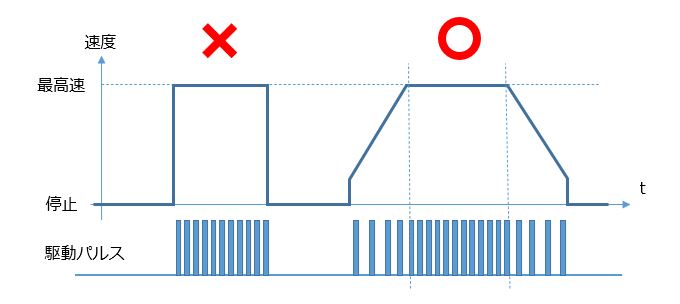
回転数は駆動パルスの間隔が長いとゆっくり、間隔が短いと高速に回転します。注意が必要なのは、停止状態からいきなり最高速のパルスを供給すると回転子やそれに接続された負荷の慣性力によって与えられたステップ数の通りに回転することができず、制御側で把握しているポジションと実際のポジションがずれてしまうといったことが発生します。この現象を「脱調」と言います。脱調を防ぐには、停止状態からの駆動では低速でスタートして徐々に速度を上げて最高速にする、停止の際は最高速から徐々に速度を下げてから停止する、というように速度を台形になるよう制御します。実際にステッピングモーターを使用するCNC工作機械のソフトウェアでも、この台形制御の速度変化を設定する項目などがあります。
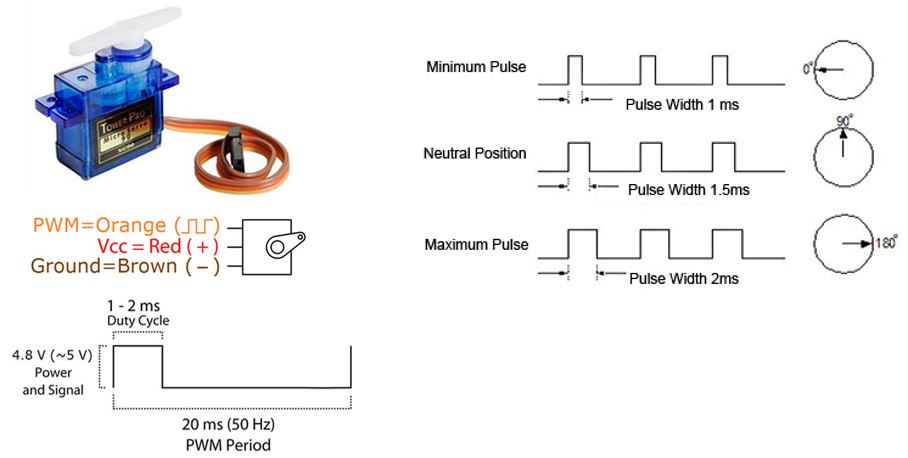
サーボモーター
インテリジェントサーボモーター

ROBOTIS社のDYNAMIXEL MX Seriesのように、ARM CORTEX-M3といった高性能なMCU(マイクロコントロールユニット)を内蔵したインテリジェントなサーボモーターもロボット制御ではよく利用されています。内蔵のプロセッサとのシリアル通信によって1回転360°を4096分割してポジション(0.088°刻み)の制御も可能なサーボモーターの一種ですが、スピード制御が可能な連続回転モードも利用でき、電流検出によるトルク制御も可能なので、様々なシーンで利用することができます。
このモーターを動かしている事例はこちらを参照してください。
ソレノイドアクチュエータ

巻線(コイル)に電流を流すと電磁石となり磁界が発生します。磁気回路を作成し、この磁界を利用して引き合う力により機械的な動きを行うものがソレノイドアクチュエータです。コイルと鉄心で構成した電磁石で「固定鉄心」とスプリングで可動する「可動鉄心」とを設け、電流を流すと電磁石の引き合う力でスプリングを圧縮して吸着し、電流を遮断するとスプリングの力で元の位置に復帰するものなどがあります。
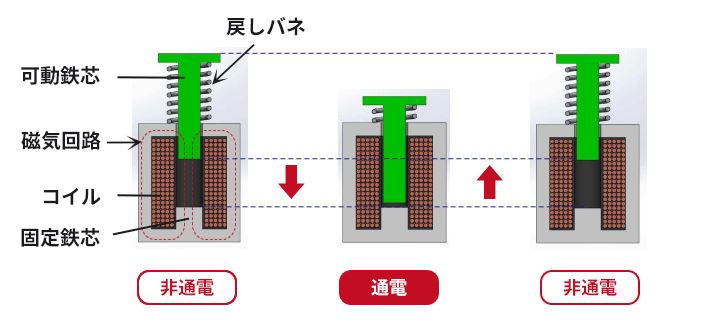 出展:天竜丸澤株式会社
出展:天竜丸澤株式会社
ソレノイドバルブ
ソレノイドの動きでバルブを操作し、空圧回路の制御を行うものにソレノイドバルブがあります。
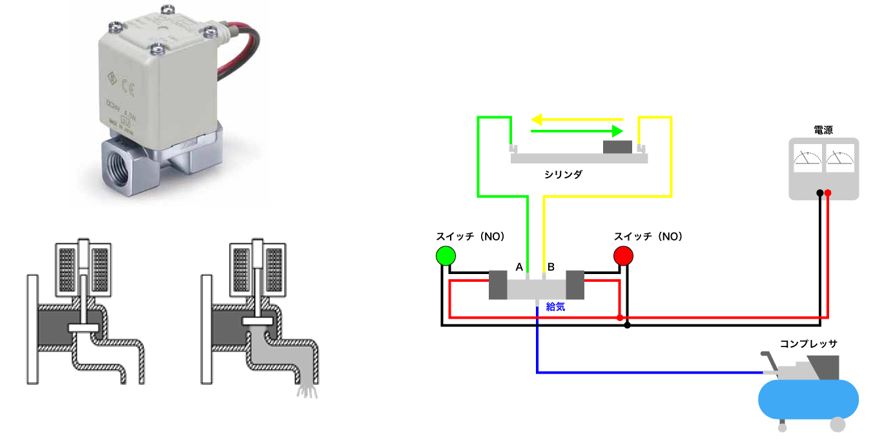
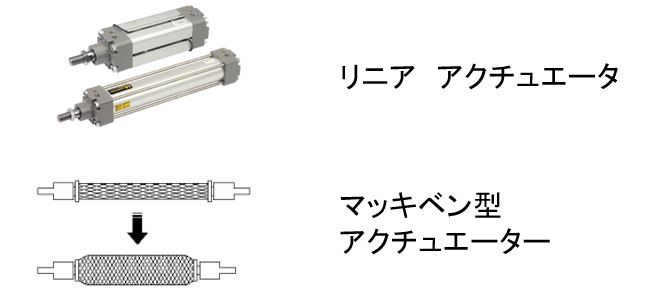
空気圧アクチュエータ
上記のソレノイドバルブを使って、駆動します。