
Contents
1.模擬工場の目的
R-CPSを小規模工場に展開する事を前提として、担当技術者が実習を通して自動化工場のIoT化の全体像を理解することができるように実験室の一角に模擬工場を設置しました。

2.全体説明
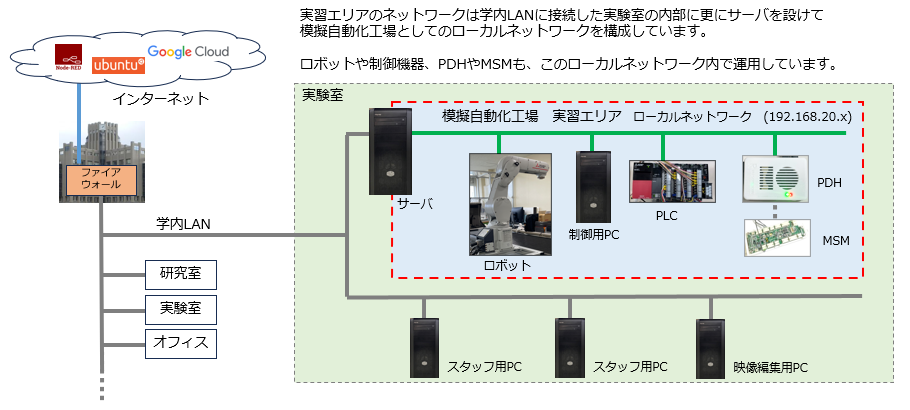
下記にネットワーク全体像を示します。学内ネットワークに模擬自動化工場専用のサーバーを設置しています。このサーバーには、学内ネットワーク用ポート(WAN側)と模擬自動化工場用のポート(LAN側)の2つのポートを設け、WAN側LAN側を完全に分離できるようにしています。サーバーをいわゆる”関所”として構成して、LAN側に接続された機器は、サーバーを介してのみWAN側と通信できるように構成しています。
企業では、オフィースに設置されたオフィースLANを学内LANと考えることができます。小規模なネットワークならば、オフィースLANをそのまま延長し、模擬自動化工場内専用LANを使わない方法もあり得ます。どちらにも良い所/悪い所が有りますので、工場だけなく全体を考えたネットワーク設計が必要です。
・本模擬自動化工場の操作手順書はここからダウンロードできます。(準備中)
3.要素説明
模擬自動化工場を構成する要素技術について説明します。
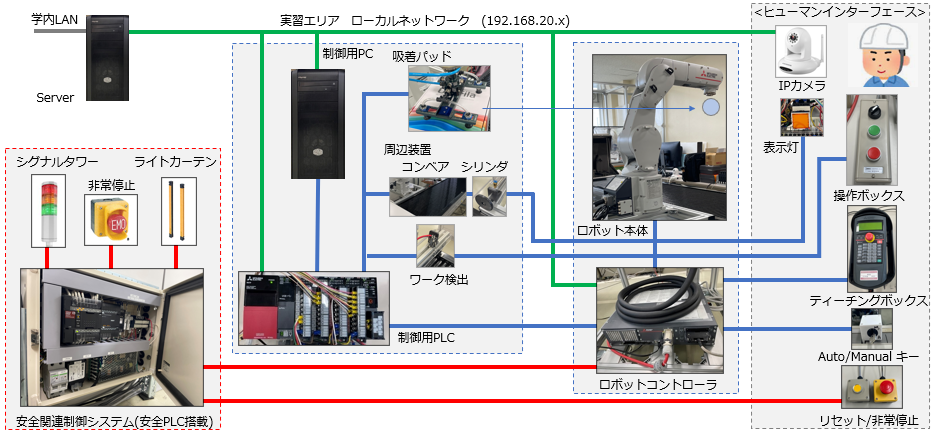
・安全機器
工場での作業を分けると、定常作業と非定常作業の2つにわけることができます。定常作業時では、安全機器が動作している監視状態で、不具合が発生した時には生産に関わる機器が安全に停止するように、工場システムを設計し施工しています。模擬自動化工場でも、運転状態を定常作業/非定常作業に切り替えることができ、実際の工場での運転状態を体験できるようにしています。非定常作業(メンテナンス等)では、安全機器の動作を停止している場合もあるので、定常作業に比べて危険度が増しますので作業は十分注意してください。

・PDHとR-MSM(実験室の126サーバーも含めて紹介)
・ロボット
三菱の産業ロボット、人協調ロボットを設置しています。工場の自動化を学ぶ観点から、ロボットの動作は予め設定されたものとして、その動作の開始/停止させるだけと言う簡単な前提としています。
ロボットのティーチングなどのロボット固有の操作については、必要に応じて、別途、対応することにしています。
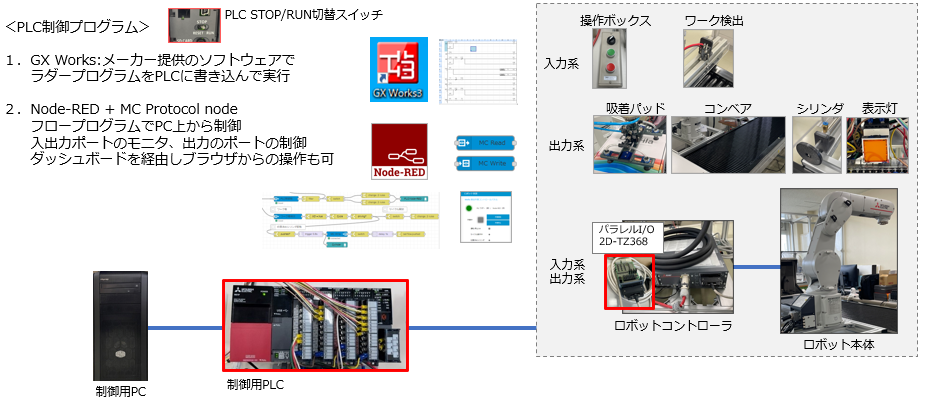
・PLC(programmable logic controller)
シーケンサーとも呼ばれ、自動機の制御に用いられます。
プログラムは、「ラダー」と呼ばれる、実際の配線(結線)や接点の開・閉が直感的にわかる記述方法です。本学では、三菱のPLCを使っています。
Node-REDを使ったPLCとの接続に関しては、以下のページをご覧ください。
・PLCでアナログ信号処理しNode-Red で取り込み。
・コンベア
コンベア本体のI/O端子とPLCを接続し、PLCを介してコンベアを制御しています。
・空気圧駆動系
圧力空気(0.7MPa)をセントラルサプライとして供給し、エアーシリンダーを使った空気圧駆動系を使っています。また、圧力空気を使った陰圧発生器を使って真空チャックを動かしています。
・PoE(Power over Ethernet)
一般的なイーサネット(LAN)ケーブルをそのまま用いて、イーサネットに接続された機器に電力を送る方法です。
有線ネットワーク上にPoE専用のスイッチングハブを使って、ここからイーサネットケーブルに信号と同時に電力を供給し、機器の手前で専用スプリッタを用いて信号と電力を分離します。接続する機器によっては、機器内部でそのまま電源を供給できるタイプもあります。
この模擬工場に設置した中継器(PDH、RaspberryPi)はPoEで電力供給しており、中継器専用の電源は取り付けていません。このように工場内にLANを構築する際に有線(イーサネットケーブル)を使う際にはお勧めの方法です。


・ネットワークカメラ(IP-CAM)
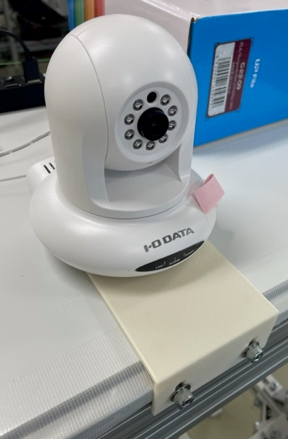
工場の稼働状況を見ることができるようにONVIF対応のIP-CAMを設置しています。カメラはサーバーに実装したNode-REDからアクセスすることが可能です。Node-REDのダッシュボードからは、パン・チルトのカメラの方向の制御(ONVIF仕様に準拠したIPカメラの制御)が可能です。
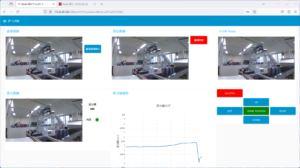 Node-REDで作ったアプリ(画像の差分で異常の検出)をサーバー上で稼働させています。
Node-REDで作ったアプリ(画像の差分で異常の検出)をサーバー上で稼働させています。
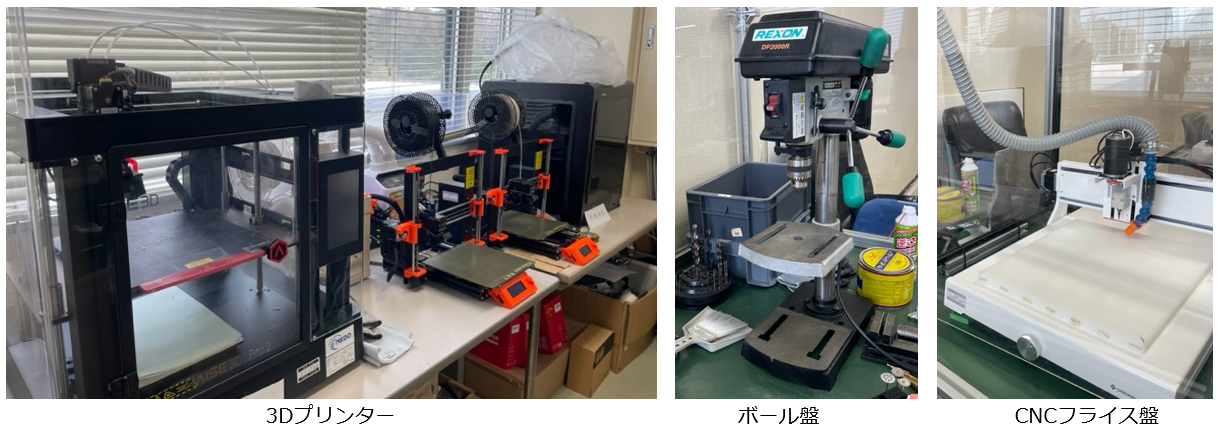
・工作室(Tool Room)
工場を維持管理するためには、小物を作るための工具を備えた場所があると便利です。模擬実験室横には、ボール盤、3Dプリンタ、半田ごて等を使える場所も確保しています。
 はんだ付け作業
はんだ付け作業