
Contents
サーミスタと絶縁デジタル出力を使った水温のPID制御
電圧をかけると発熱するフィルムヒーターがあります。
これを空き缶に巻き付けて、中に水を入れて、電圧をかけて温めます。そして、水温をモニタして目標の温度を超えたら電圧をオフし、冷めて目標温度より下がったら電圧をオンします。この動作により、水温を一定に保つことを自動でやらせます。
1. 実験装置と制御回路
図1のようにフィルムヒータを巻いた空き缶に水を入れ、サーミスタで測った水温をRaspberry Piでモニタします。制御回路は、Raspberry PiのPWM出力により、フィルムヒータの電源をON/OFFします。
フィルムヒータは、制御回路の制御により、電圧が供給されると発熱し電圧が切れると発熱を止めます。そこで、サーミスタの温度をモニタしたRaspberry Piが制御回路の電源ON/OFFを制御し水温を目標温度に保ちます。その制御の手法として、PID(Proportional-integral-Derivative)制御を使用します。
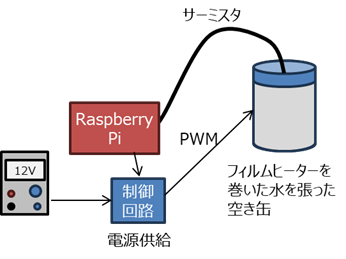
図1. PID制御実験装置のブロック図
フィルムヒーター(AL-DC-A6-30-2.3A)のON/OFF制御回路は、Nch パワーMOS Trを使って行う。図2に制御回路の回路図を載せます。ここではNchパワーMOS Trとして2SK2232を使用しています。
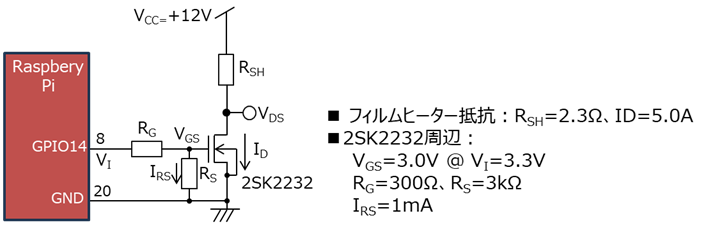
図2. フィルムヒーターのON/OFF制御回路
サーミスタはIKUSEiキットに付属しています。サーミスタをHATのコネクタJ5の2ピンと3ピンに挿して使用します。制御回路は、IKUSEiキットのHAT部のコネクタJ6に「絶縁デジタル出力」として搭載されており、HATのコネクタJ6を使用すれば回路を作る必要はありません。図3にIKUSEiキットを使った実験装置の回路図を示します。
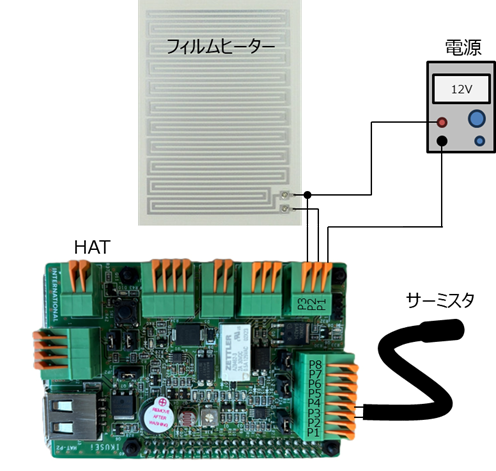
図3 IKUSEiキットを使ったPID制御回路
2. PID制御
PID制御(Proportional-Integral-Derivative Control)は、自動制御の世界で最も一般的な制御手法の一つで、「目標の値(設定値)」と「現在の値」のズレ(偏差)を計算し、そのズレをゼロにするために3つの要素(P・I・D)を組み合わせて調整を行う制御手法です。
3-1. 3つの制御要素
・ P(比例:Proportional)「今のズレを埋める」
ズレの大きさに比例して操作量を決める。ズレが大きいほど強く温め、近づくと弱める。
弱点: これだけだと目標の直前で力が足りなくなり、わずかなズレ(残留偏差)が残る。
・ I(積分:Integral)「過去のズレを溜めて消す」
これまでのズレを合計し、時間が経過しても残っているズレを解消しようとする。
弱点: 反応が少し遅れ、目標を通り過ぎてしまう(オーバーシュート)原因になることがある。
・ D(微分:Derivative)「未来の動きを予測し安定させる」
ズレの変化の勢いを見て、急激な変化にブレーキをかける。
弱点: 外乱(急に窓が開いて冷気が入った時など)に対して素早く反応し、制御を安定させる一方、ノイズに弱く制御が暴れる可能性がある。
3-2. PID制御の仕組み
PID制御のブロック図を図4に示します。
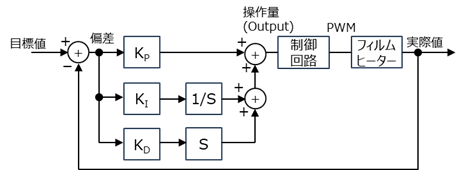
図4 PID制御のブロック図
制御回路のON/OFFは、PWM(Pulse Wave Modulation)で行います。PIDの操作量とPWMのON/OFFの比率の関係を図5に示します。
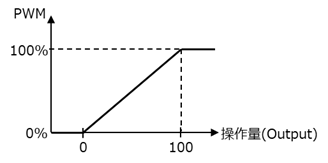
図5 操作量とPWMの関係
数式で表すと、操作量 u(t) は以下のようになります(e(t) は偏差)

3-3. メリット・デメリット
表1. PID制御のメリット・デメリット
|
特徴 |
内容 |
|---|---|
|
メリット |
構造がシンプルで汎用性が高く、多くの工業製品に使われている。 |
|
デメリット |
P・I・Dそれぞれのパラメータ(ゲイン)の調整(チューニング)が難しい。 |
3-4. 活用例
活用例としては、ドローンの姿勢制御(傾きを検知して瞬時にプロペラの回転数を調整)、工場の温度管理(加熱ヒーターの出力を細かく制御)、自動運転の速度維持(前の車との距離を一定に保つ)があります。
4. PID制御の実装
上記のPID制御をNode-REDのフローとして実装します。