RS485-Modbus
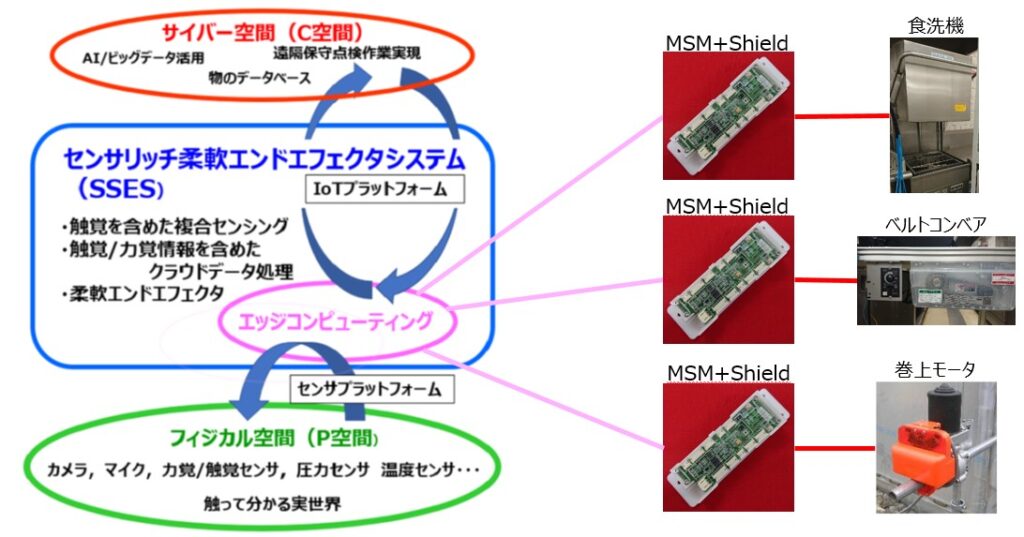
センサリッチ柔軟エンドエフェクタシステム(SSES)により、IoT化が進まない生産現場へのAI・ビッグデータの導入や自動化が可能になる。
農業や飲食業の現場では、ヒトによる操作や監視が必要な機器(スタンドアローン機器)が数多く存在し、機器の自動運転や機器間の連携が課題である。
本稿ではSSESのキーデバイスであるマルチセンサーモジュール(MSM)にスタンドアローン機器の制御・通信機能を付加して(以下MSM+Shield) SSES連携及び自動化した事例を報告する。
RS485-Modbusネットワーク
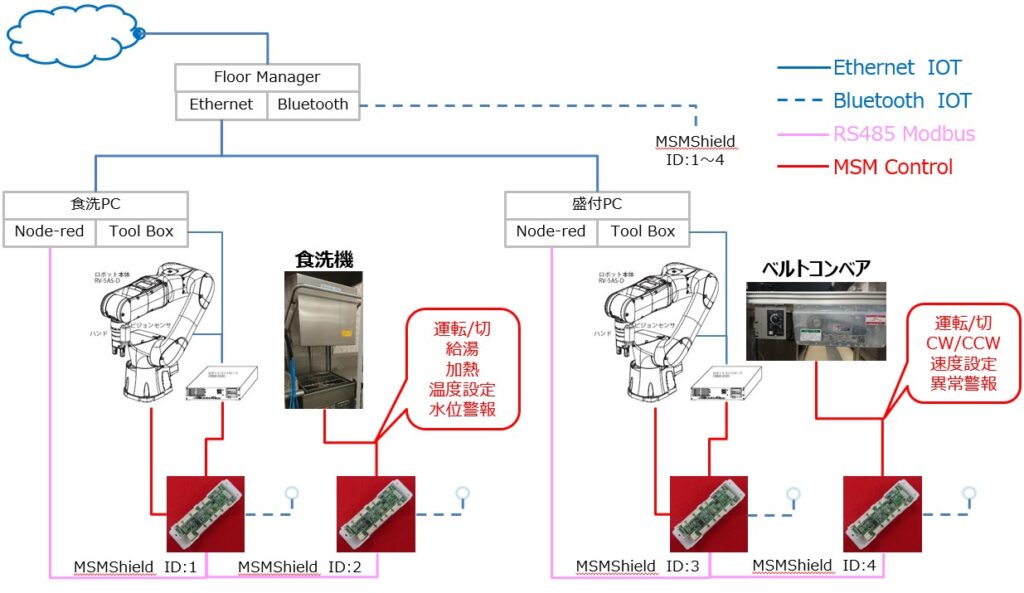
S485-Modbus ネットワーク(厨房自動化の例)
- RS485 は、電子機器間でシリアル通信を行うための通信規格であり、以下の特長がある。
□ RS-232Cの後継規格であり、ハードウエア、ソフトウエアの継承が容易である
□ N:N接続(RS-232Cは1:1)、ブロードキャスト等によりリアルタイム性を確保できる
□ 通信線2本の構成で拡張が容易である(最大10Mbps、最長1.2km)
- Modbus は、産業用電子機器等を接続する通信プロトコルであり、以下の特長がある。
□ 仕様が公開されていて、利用が無料である
□ 実装が比較的容易である
□ データをそのまま転送でき、ベンダーに多くの制約を設けていない
RS485-Modbusシステム
- RS485-Modbus システム(試作品)は、R-MSM基板及びRS485基板群で構成されるModbusネットワークとコントロールPCにより構成される。
各RS485基板にはModbusプロトコルに適合する機器が接続されるが、適用例としてメカニカルリレーを接続している。
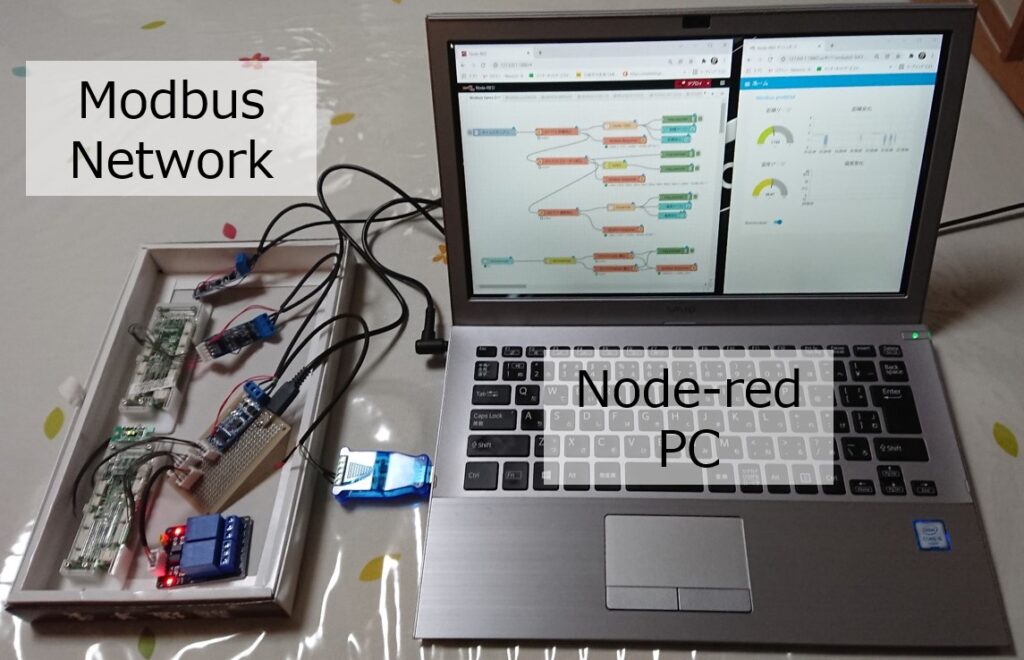
RS485-Modbus システム(試作品)
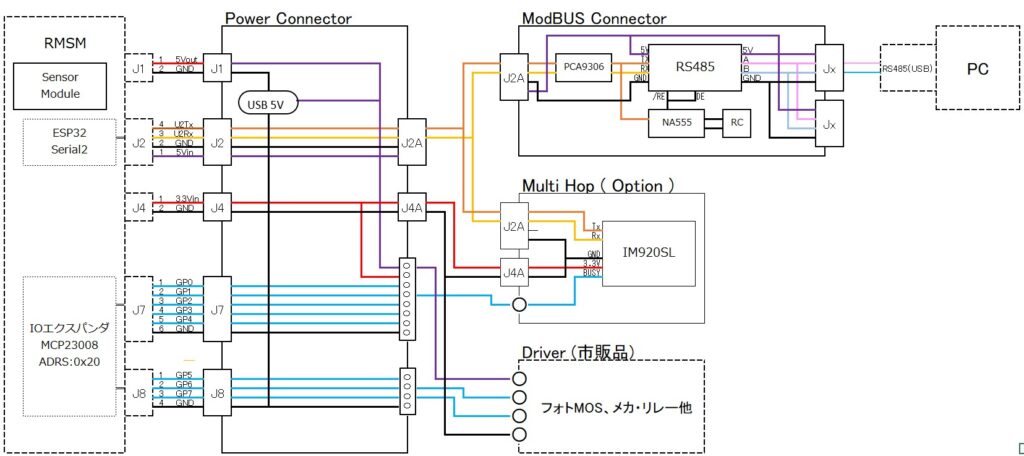
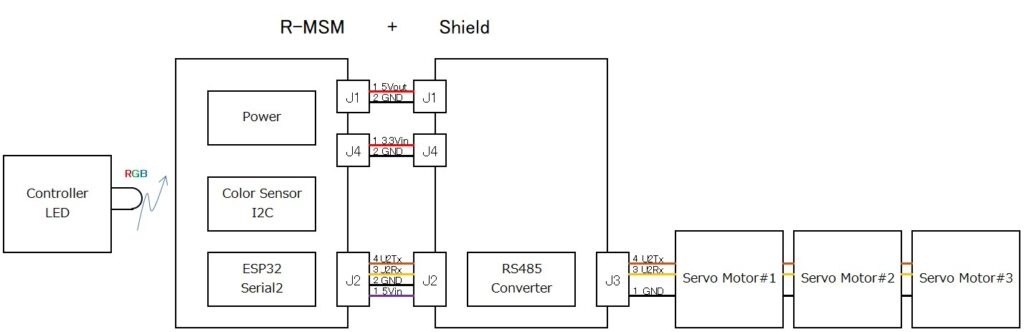
MSM+Shield ブロック図
- Modbusネットワークに接続された機器類は、コントロールPC上のNode-redより制御される。
機器類は、Modbusレジスタマップに割り当てられたアドレスにより識別され、機器個別にあるいはすべての機器一括に制御される。
R-MSMに搭載されたセンサ類にもアドレスが割り当てられており、センサ情報を各機器から利用することも可能である。
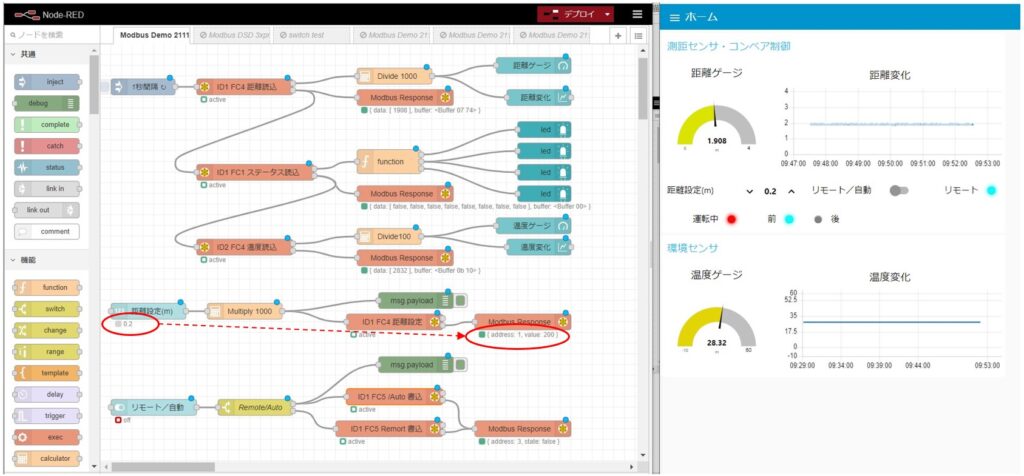
Modbus コントロール画面(Node Red)
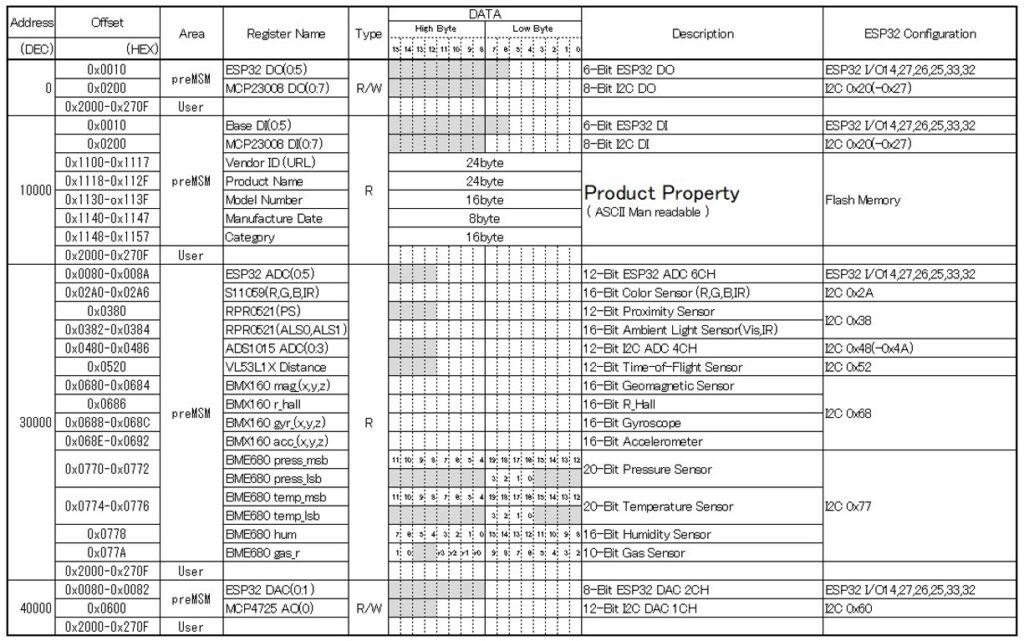
Modbus レジスタマップ
適用事例
- 適用事例として、ベルトコンベアの位置決め制御、農業ハウスのシート巻上制御を示す。
ベルトコンベアの位置決め制御では、R-MSMの測距センサの距離情報により、コンベアの運転方向の切替や速度を制御している。及び(試作品)は、R-農業ハウスのシート巻上制御では、R-MSMの環境センサの温湿度情報により、シートの巻上量を制御している。
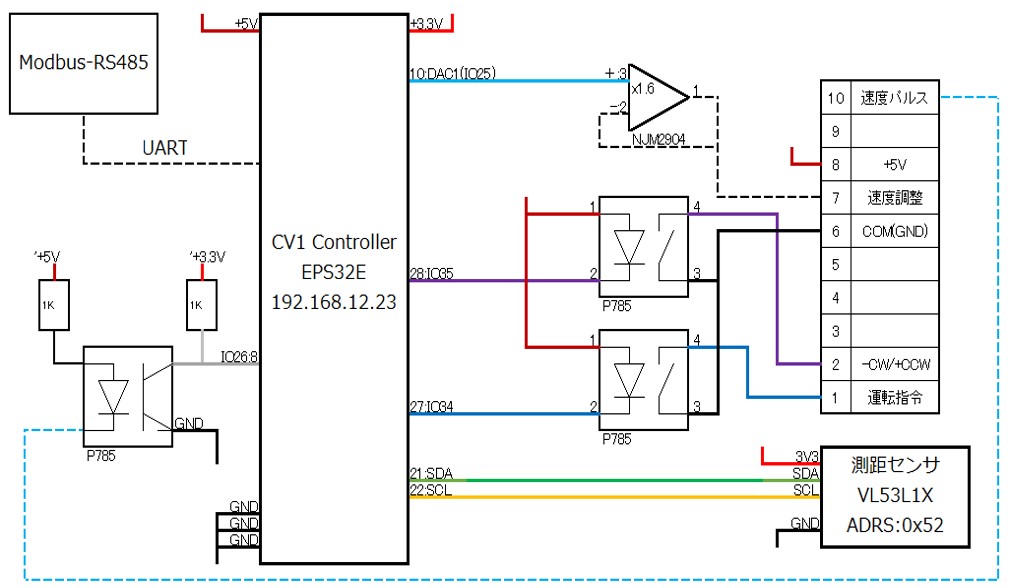


ベルトコンベア 制御システム
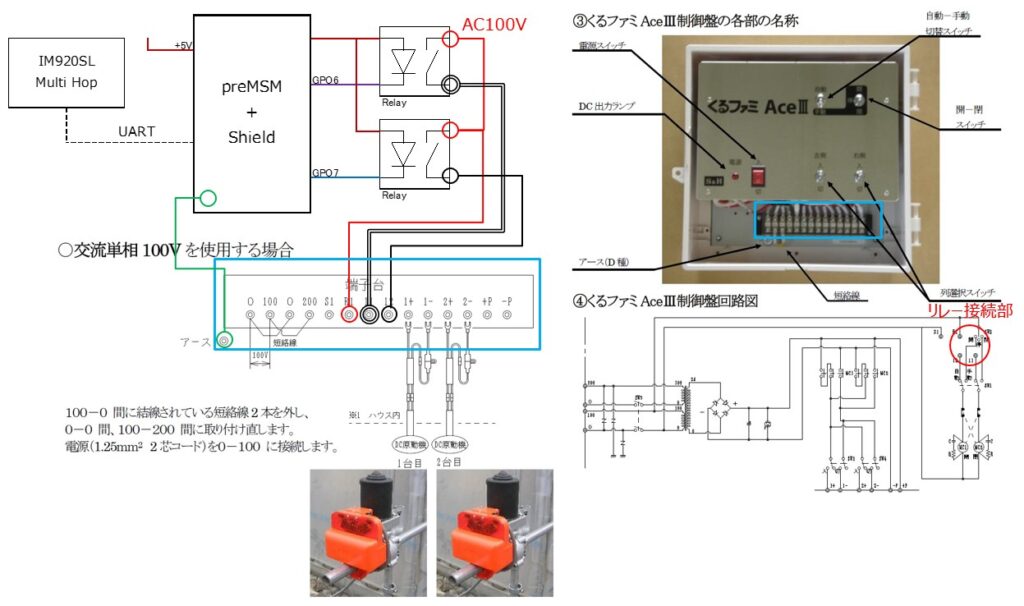
シート巻上 システム
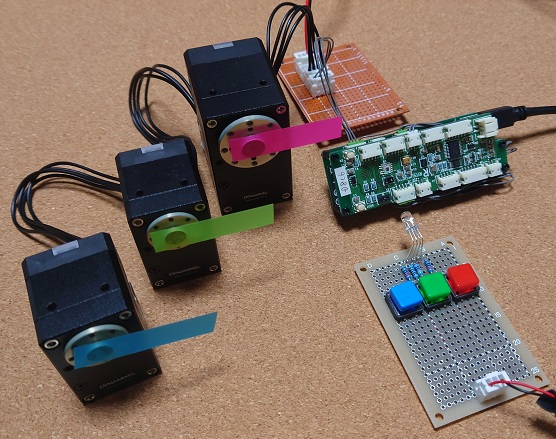
- その他のRS485プロトコルの事例として、サーボモータ制御を示す。
サーボモータをロボットの関節等に使用する場合には、関節個別にあるいはすべての関節を同期させる制御が必要である。
また、モータへの動作命令に対する回転角、速度、トルク等のフィードバックの高速性が要求されるため、専用のプロトコルを用いる場合が多い。
動画では、R-MSMのカラーセンサを用いて、検知した色信号によりモータを動作させている。
RS485サーボモータ制御動画
- 上記動画の構成要素は下記の通りである。