
機器へのフィードバックルートの設定
ロボット等制御用のPCには、位置座標や制御関数の定数等を初期設定用のファイルとして持たせておき、メインプログラムから起動時や定期的に読み込ませるようしておきます。
この初期設定用ファイルを、クラウドからの値によって定期的に最適値に書き換えます。データフローを以下に示します。
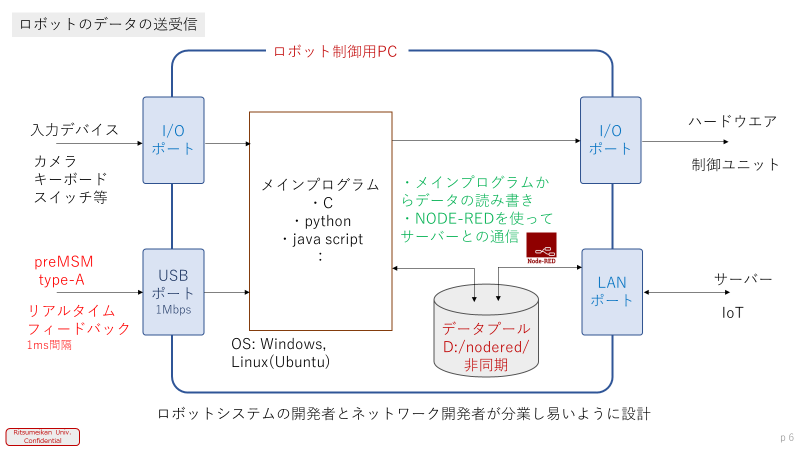
図1. クラウドからの値を制御PCにインポート
制御用のPCでは、初期設定用ファイルを保存する、データブールを定義しておきます。このデータプルとエッジサーバーと間をNode-REDで繋ぎデータを送受します。
ロボットの動作情報(モータの電流値や位置情報など)もこのデータプルに書き出すようにメインプログラムを記述します。
書き出された、動作情報はNode-REDを使って、エッジサーバーへと送り、エッジサーバからは、センサモジュールのデータと共にクラウドへ送ります。