
ROSは、Robot Operating System(ロボットオペレーティングシステム)の略です。ロボットシステムを開発する際に利用するツールやライブラリが含まれたオープンソースソフトウェアを指します。ROS2は安全性やリアルタイム性を向上させた次世代バージョンのROSであります。本プロジェクトではROS2を用いて実用化に向けたロボットシステムを開発しています。
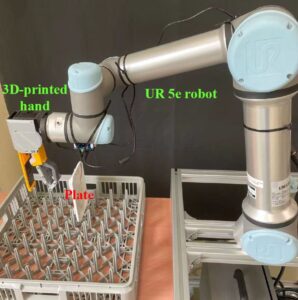
現在、左図に示すURロボット、Robotisモーターで駆動するロボットハンドで構成されるシステムはROS2を用いて構築しました。URロボットのROS2での動かし方について、ご興味がある方々は下記のstep-by-stepチュートリアルをご参照ください。
Introduction of how to control ur_5e manipulator by using ROS2
また、RobotisモーターをROS2での駆動チュートリアルは下記のリンクからアクセスできます。