
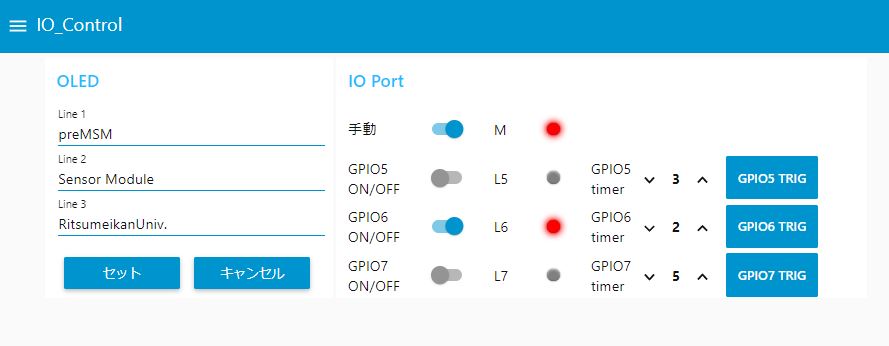
センサモジュールは搭載したセンサで取得したデータを送り出す機能だけでなく、コマンドを受信することで出力ポートを操作したり、オプションで接続したOLED表示装置に文字を表示することができます。この機能を利用してセンサの状態によって出力ポートを操作してベルトコンベアのモーターなどの外部機器を駆動する事も可能です。また、OLED表示装置にメッセージを表示することでシステムの状態や各種情報を知らせることができます。基本的には「センサーモジュールの運転条件の設定」のページで紹介しているコマンドで各ポートやOLED表示装置の内容を設定するコマンドを送信しますが、Node-REDのダッシュボードを使用してこのページの上に挙げたようなユーザーインターフェースを作成する事も可能です。
- アームロボットUR10eのピックアンドプレース実験装置に取り付けた表示装置の例
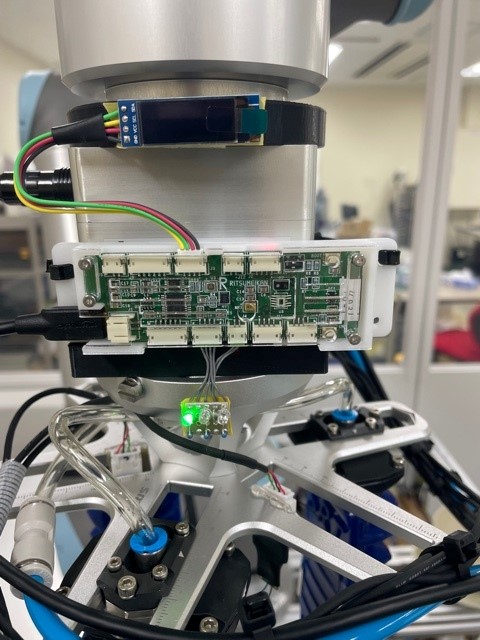
アームロボット先端に、ステータスLED(赤、緑、青)とOLED表示装置を装着した事例です。OLED表示装置はセンサモジュールの外部I2Cコネクタに接続しています。
対象物をピックアップして所定の位置に移動して降ろす、という一連の動作を行う中でシステムの状態(センサ稼働状態、動作開始受付状態、動作中)をLEDで表示しています。
OLED表示装置は動作を開始するとタイムスタンプを元に作成されるセンサデータファイルの名称を表示するようにしています。
- アームロボットUR10eのピックアンドプレース実験装置に取り付けた外部機器駆動の例
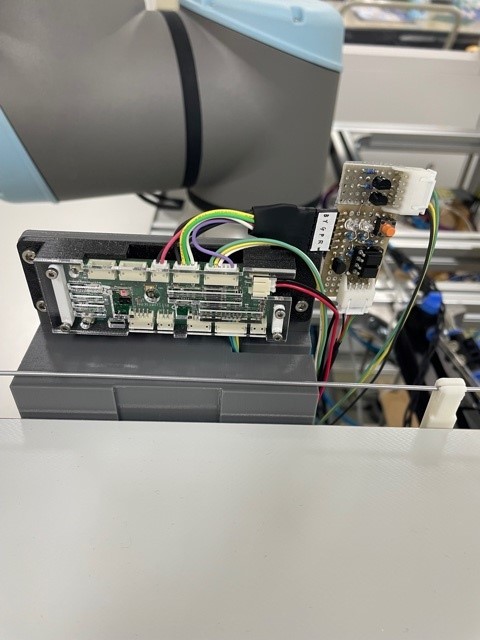
ベルトコンベアに取り付けたセンサモジュールに対してコマンドを送ることで、IOポートを操作してリレーユニットを駆動しています。
リレーユニットはベルトコンベアの制御回路に接続されており、ピックアンドプレース作業で対象物がベルトコンベアに置かれたらコンベアを駆動して対象物を搬送する動作を行っています。
同じシステムでもう一つIOポートを操作してリレーユニットを動かしている回路があります。
こちらはゲートウェイ上のNode-REDの一連の処理が終了して次の動作に移行できる状態になった時にONすることで、アームロボットUR10eの動作開始受付状態をアームロボットのコントローラーに伝える役割を担っています。このポートの信号はロボットが動作を開始するとリセットされて次の動作に備えます。 - 上記のように一連のシステムで使用しているポートをNode-REDのダッシュボードからも操作できるようにすると、手動の操作コマンドが原因で意図しない動作につながる恐れがあります。そのため、一番最初に挙げたダッシュボードの操作画面では手動のオーバーライドを許可するスイッチを設けており、このスイッチを操作しない限り手動操作が有効にならないよう配慮しています。

