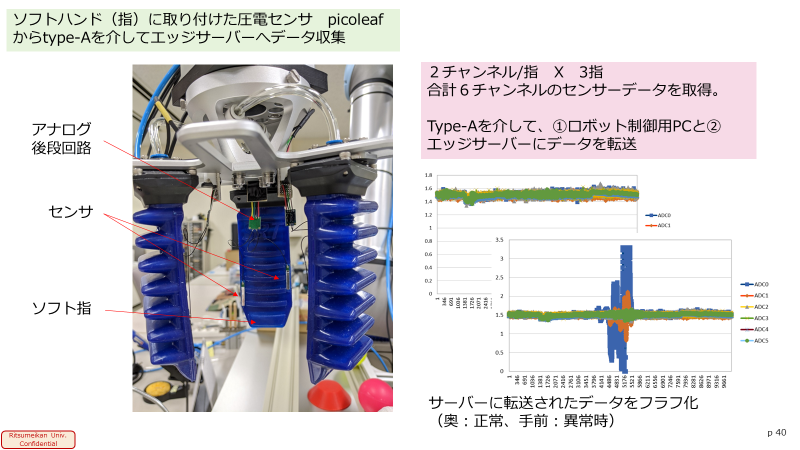
フレキシブルセンサを使った測定
村田製作所製の圧電センサ(picoleaf協)を使った、ロボットに取り付けたソフトハンドの指の動作状態を検出する事例を紹介します。
このセンサは下記の写真の通り、アナログ後段回路の基板1枚に対して2つの圧電センサを接続することができます。
ソフトハンドの指は3本ありますので、それぞれの指に圧電センサ2つ、アナログ後段基板1つの構成で3組用意しています。
アナログ後段基板では、圧電センサのひずみ量に応じて0V~3.3V(給電電圧)の間でアナログ電圧として出力します。
センサモジュールでは、このアナログ電圧の信号をADC(アナログ-デジタル変換器)でデジタル値に変換して読み込みます。
ロボットが動作してソフトハンドの指が曲がった際に、その変化を読み取ることができます。
ロボットのプログラムによる動作タイミングと、このセンサーの信号の変化のタイミングで次のようなことが判定できます。
1)ロボットの正常動作で「把持対象」を掴むために指を曲げた時
2)把持対象物がロボットの動作中に落下するなどの異常があったとき
3)ロボット動作中に、指がテーブル等の構造物に接触した時
- 協:協力支援企業様の製品です。